multiCameraParameters
Description
The multiCameraParameters object stores the intrinsic and
extrinsic parameters of a multi-camera system estimated during multi-camera
calibration.
Creation
Create a multiCameraParameters object using the
estimateMultiCameraParameters function.
Properties
Examples
Estimate the relative position and orientation of six cameras with overlapping fields of view by using calibration images that contain a single ChArUco board.
Download the calibration images.
calibImagesURL = "https://www.mathworks.com/supportfiles/vision/data/overlapping-cameras-charuco.zip"; calibImagesDir = fullfile(pwd,"overlapping-cameras-charuco"); calibImagesZip = fullfile(pwd,"overlapping-cameras-charuco.zip"); if ~exist(calibImagesZip,"file") disp("Downloading calibration images (52 MB)...") websave(calibImagesZip,calibImagesURL); end
Downloading calibration images (52 MB)...
if ~exist(calibImagesDir,"dir") unzip(calibImagesZip,pwd) end
Specify calibration image filenames for each camera.
numCameras = 6; camDirPrefix = "Cam00"; imageFiles = cell(1,numCameras); for i = 1:numCameras camDir = fullfile(calibImagesDir,camDirPrefix+i); imds = imageDatastore(camDir); imageFiles{i} = imds.Files; end imageFiles = [imageFiles{:}];
Define the ChArUco board properties. Specify checker size and marker size in centimeters.
markerFamily = "DICT_6X6_1000"; patternDims = [5 5]; markerSize = 6.8; % in cm checkerSize = 9.15; % in cm numKeyPoints = prod(patternDims - 1); minMarkerId = 144;
Detect the key points of the ChArUco board in the calibration images.
imagePoints = detectPatternPoints(imageFiles,"charuco-board",patternDims, ... markerFamily,checkerSize,markerSize,MinMarkerID=minMarkerId);
[==================================================] 100% Elapsed time: 00:00:09 Estimated time remaining: 00:00:00
Generate the world points for the pattern.
worldPoints = patternWorldPoints("charuco-board",patternDims,checkerSize);Load the intrinsic parameters of the six cameras. These parameters have been estimated using the Using the Single Camera Calibrator App.
ld = load("sixCameraIntrinsics.mat");Perform multi-camera calibration.
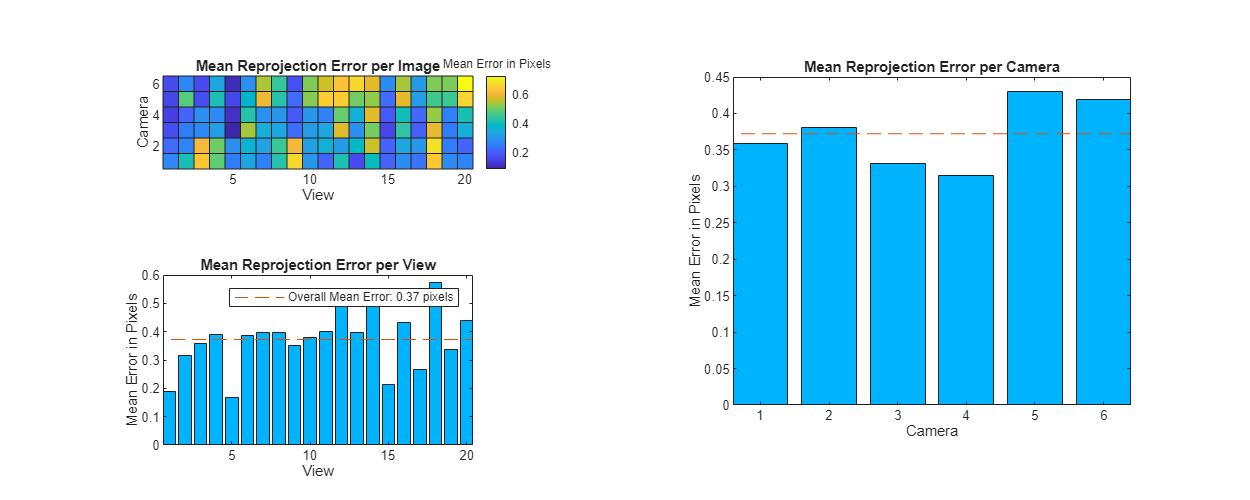
params = estimateMultiCameraParameters(imagePoints,worldPoints,ld.intrinsics,WorldUnits="cm");Visualize the calibration accuracy.
figure(Position=[100,100,1000,400]) showReprojectionErrors(params)
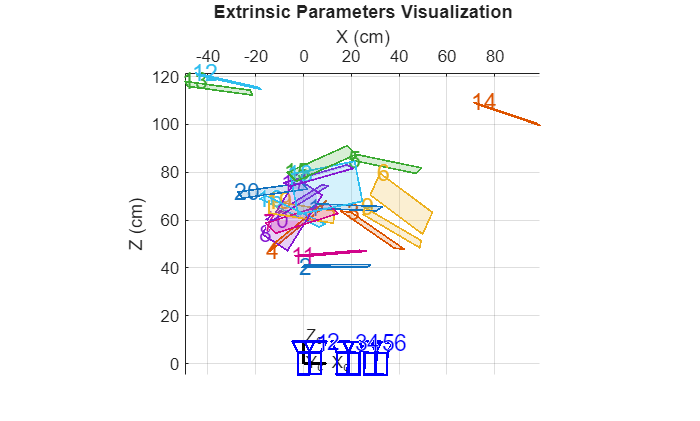
Visualize the camera extrinsic parameters.
figure showExtrinsics(params) view(2)