detectPatternPoints
Detect keypoints of calibration pattern in images from multiple cameras
Since R2025a
Syntax
Description
Natively Supported Patterns
imagePoints = detectPatternPoints(imageFileNames,"charuco-board",patternDims,markerFamily,checkerSize,markerSize)imageFileNames, with dimensions specified by
patternDims, markerFamily, and
checkerSize.
imagePoints = detectPatternPoints(imageFileNames,"aprilgrid",patternDims,tagFamily)imageFileNames, with dimensions specified by
patternDims.
imagePoints = detectPatternPoints(imageFileNames,"checkerboard",patternDims)imageFileNames, with dimensions specified by
patternDims. The values of the elements of
patternDims must not be equal.
imagePoints = detectPatternPoints(imageFileNames,"circle-grid-asymmetric",patternDims)imageFileNames, with dimensions specified by
patternDims.
Custom Pattern Detector
imagePoints = detectPatternPoints(imageFileNames,patternDetector,numKeyPoints)numKeyPoints of a custom calibration pattern that can be detected
in an image using the specified detector function
patternDetector.
Optional Arguments
imagePoints = detectPatternPoints(___,Name=Value)Verbose=true displays
the progress of the detection process.
Examples
Download the calibration images.
calibImagesURL = "https://www.mathworks.com/supportfiles/vision/data/overlapping-cameras-aprilgrid.zip"; calibImagesDir = fullfile(pwd,"overlapping-cameras-aprilgrid"); calibImagesZip = fullfile(pwd,"overlapping-cameras-aprilgrid.zip"); if ~exist(calibImagesZip,"file") disp("Downloading calibration images (54 MB)...") websave(calibImagesZip,calibImagesURL); end
Downloading calibration images (54 MB)...
if ~exist(calibImagesDir,"dir") unzip(calibImagesZip,pwd) end
Specify calibration image filenames for each camera.
numCameras = 6; camDirPrefix = "Cam00"; imageFiles = cell(1,numCameras); for i = 1:numCameras camDir = fullfile(calibImagesDir,camDirPrefix+i); imds = imageDatastore(camDir); imageFiles{i} = imds.Files; end imageFiles = [imageFiles{:}];
Define the AprilGrid properties.
patternDims = [6 6];
tagFamily = "tag36h11";Detect the key points of the AprilGrid in the calibration images.
imagePoints = detectPatternPoints(imageFiles, "aprilgrid", ... patternDims,tagFamily);
[==================================================] 100% Elapsed time: 00:00:32 Estimated time remaining: 00:00:00
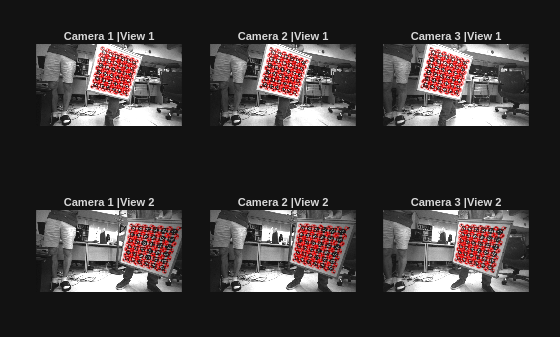
Display the detected keypoints of the AprilGrid in the first two views for three of the six cameras.
tiledlayout(2,3,TileSpacing="compact",Padding="compact"); for viewIdx = 1:2 for camIdx = 1:3 nexttile imshow(imageFiles{viewIdx,camIdx}) title("Camera " + camIdx + "|View " + viewIdx) hold on plot(imagePoints(:,1,viewIdx,camIdx),imagePoints(:,2,viewIdx,camIdx), ... "ro",MarkerSize=3) end end
Estimate the relative position and orientation of six cameras with overlapping fields of view by using calibration images that contain a single ChArUco board.
Download the calibration images.
calibImagesURL = "https://www.mathworks.com/supportfiles/vision/data/overlapping-cameras-charuco.zip"; calibImagesDir = fullfile(pwd,"overlapping-cameras-charuco"); calibImagesZip = fullfile(pwd,"overlapping-cameras-charuco.zip"); if ~exist(calibImagesZip,"file") disp("Downloading calibration images (52 MB)...") websave(calibImagesZip,calibImagesURL); end
Downloading calibration images (52 MB)...
if ~exist(calibImagesDir,"dir") unzip(calibImagesZip,pwd) end
Specify calibration image filenames for each camera.
numCameras = 6; camDirPrefix = "Cam00"; imageFiles = cell(1,numCameras); for i = 1:numCameras camDir = fullfile(calibImagesDir,camDirPrefix+i); imds = imageDatastore(camDir); imageFiles{i} = imds.Files; end imageFiles = [imageFiles{:}];
Define the ChArUco board properties. Specify checker size and marker size in centimeters.
markerFamily = "DICT_6X6_1000"; patternDims = [5 5]; markerSize = 6.8; % in cm checkerSize = 9.15; % in cm numKeyPoints = prod(patternDims - 1); minMarkerId = 144;
Detect the key points of the ChArUco board in the calibration images.
imagePoints = detectPatternPoints(imageFiles,"charuco-board",patternDims, ... markerFamily,checkerSize,markerSize,MinMarkerID=minMarkerId);
[==================================================] 100% Elapsed time: 00:00:09 Estimated time remaining: 00:00:00
Generate the world points for the pattern.
worldPoints = patternWorldPoints("charuco-board",patternDims,checkerSize);Load the intrinsic parameters of the six cameras. These parameters have been estimated using the Using the Single Camera Calibrator App.
ld = load("sixCameraIntrinsics.mat");Perform multi-camera calibration.
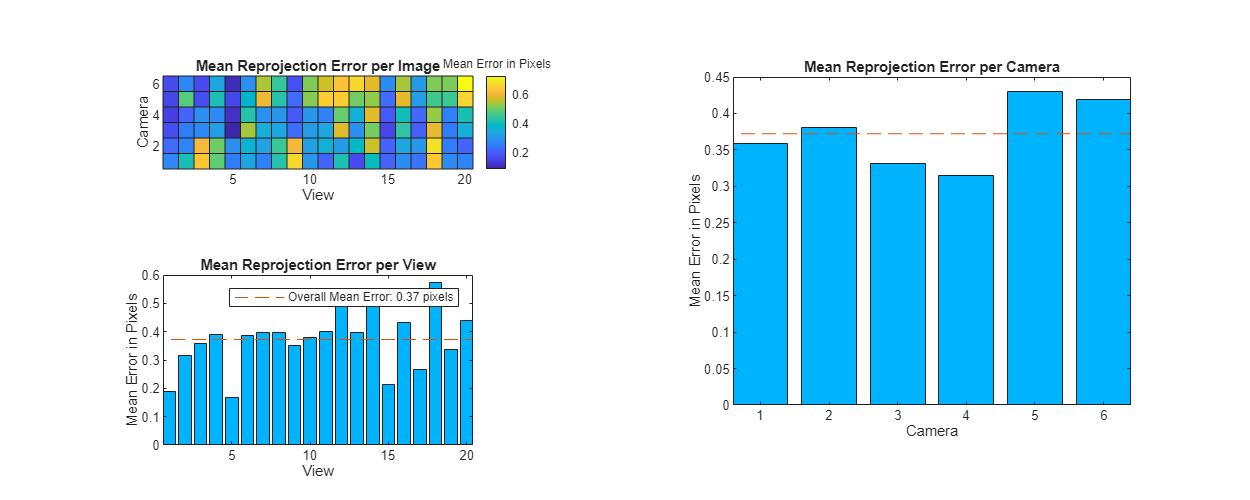
params = estimateMultiCameraParameters(imagePoints,worldPoints,ld.intrinsics,WorldUnits="cm");Visualize the calibration accuracy.
figure(Position=[100,100,1000,400]) showReprojectionErrors(params)
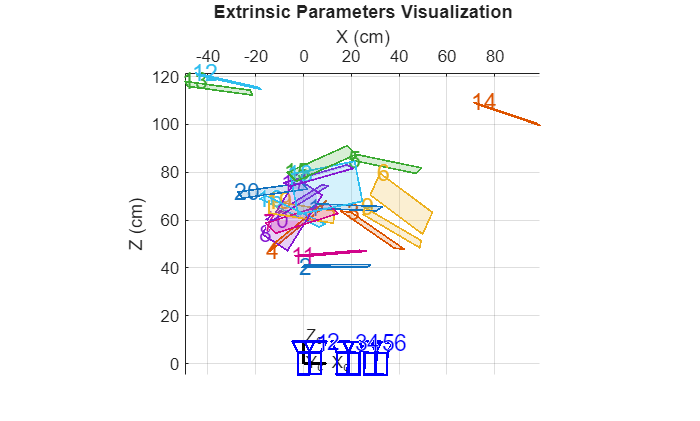
Visualize the camera extrinsic parameters.
figure showExtrinsics(params) view(2)
Input Arguments
Name-Value Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2025aSee Also
Objects
Functions
Topics
- What Is Camera Calibration?
- What Is Robot Hand-Eye Calibration?
- Calibration Patterns
- Prepare Cameras and Capture Images for Multi-Camera Calibration
- Using the Single Camera Calibrator App
- Coordinate Systems
- Evaluating the Accuracy of Single Camera Calibration
- 3-D Motion Reconstruction Using Multiple Cameras