selectSubmap
Select submap within map
Description
Examples
Load a normal distributions transform (NDT) map from a MAT file.
data = load('ndtMapParkingLot.mat');
ndtMap = data.ndtMapParkingLot;Load point cloud scans and pose estimates from a second MAT file.
data = load('parkingLotData.mat');
ptCloudScans = data.parkingLotData.ptCloudScans;
initPoseEsts = data.parkingLotData.initPoseEsts;Display the NDT map.
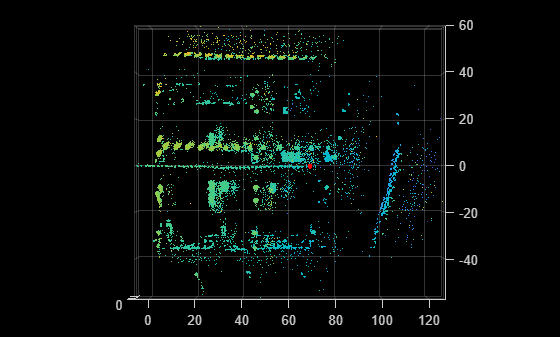
show(ndtMap)
Change the viewing angle to top-view.
view(2)
Select the submap centered around the first estimate.
center = initPoseEsts(1).Translation; sz = [70 50 20]; ndtMap = selectSubmap(ndtMap,center,sz);
Set the radius for visualization of the current location and the distance threshold to update the submap.
radius = 0.5; distThresh = 15;
Loop over the point clouds, localize them in the map, and update the selected submap as needed.
numScans = numel(ptCloudScans); for n = 1:numScans ptCloud = ptCloudScans(n); initPose = initPoseEsts(n); poseTranslation = initPose.Translation; [isInside,distToEdge] = isInsideSubmap(ndtMap,poseTranslation); submapNeedsUpdate = ~isInside ... % Current pose is outside submap || any(distToEdge(1:2) < distThresh); % Current pose is close to submap edge if submapNeedsUpdate ndtMap = selectSubmap(ndtMap,poseTranslation,sz); end % Localize the point cloud scan in the map. currPose = findPose(ndtMap,ptCloud,initPose); % Display the position of the estimate as a circle. pos = [currPose.Translation(1:2) radius]; showShape('circle',pos,'Color','r'); % Pause to view the change. pause(0.05) end
Input Arguments
Output Arguments
Tips
Extended Capabilities
Version History
Introduced in R2021a