toStruct
Convert a stereo parameters object into a struct
Description
paramStruct = toStruct(stereoParams)stereoParams
input object. You can use the struct to create an identical stereoParameters object. Use the struct for C code generation. You can call
toStruct, and then pass the resulting structure into the
generated code, which recreates the stereoParameters object.
Examples
Specify calibration images.
leftImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","left")); rightImages = imageDatastore(fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo","right"));
Detect the checkerboards.
[imagePoints,patternDims] = ...
detectCheckerboardPoints(leftImages.Files,rightImages.Files);Specify the world coordinates of the checkerboard keypoints. Square size is in millimeters.
squareSize = 108; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Calibrate the stereo camera system. Both cameras have the same resolution.
I = readimage(leftImages,1); imageSize = size(I,1:2); params = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
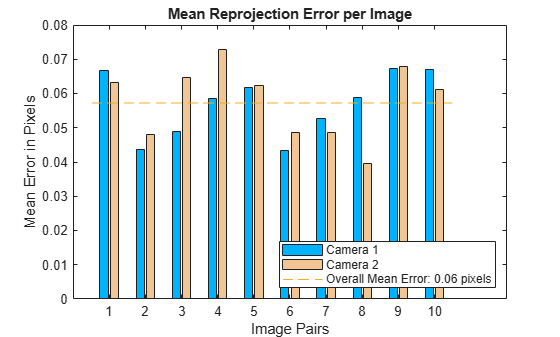
Visualize the calibration accuracy.
showReprojectionErrors(params)
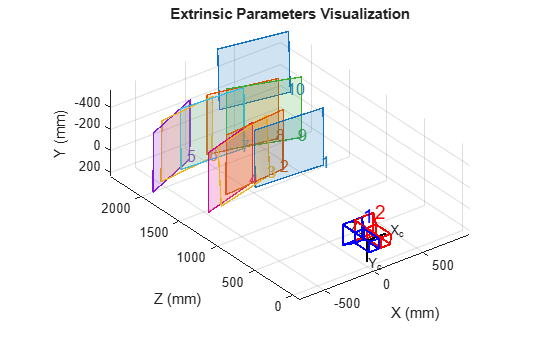
Visualize camera extrinsics.
figure showExtrinsics(params)
Convert to structure.
paramsStruct = toStruct(params)
paramsStruct = struct with fields:
CameraParameters1: [1×1 struct]
CameraParameters2: [1×1 struct]
RotationOfCamera2: [3×3 double]
TranslationOfCamera2: [-119.8720 -0.4005 -0.0258]
Version: [1×1 struct]
RectificationParams: [1×1 struct]
Input Arguments
Output Arguments
Version History
Introduced in R2015a