OptimizerSADEA
Description
Use the OptimizerSADEA object to create a SADEA optimizer. Use the
object's properties and functions to set up and tune the optimizer parameters. Then, integrate
the SADEA optimizer as a black box into your workflow using a function handle.
You can use the SADEA optimizer for moderate-dimensional global optimization problems (with 30 or fewer design variables) where function evaluations are costly. It is particularly effective for applications such as optimizing antenna designs with limited tunable parameters, wideband or multi-band antenna optimization, and multi-objective optimization.
The SADEA optimizer aims to find a global minimum of the objective function across several design variables within a bounded domain. For more information, see Antenna and Array Optimization Algorithms.
Creation
Description
s = OptimizerSADEA(bounds)bounds.
s = OptimizerSADEA(bounds,PropertyName=Value)PropertyName is the property
name and Value is the corresponding value. You can specify the
name-value arguments in any order as
PropertyName1=Value1,...,PropertyNameN=ValueN. Properties that you
do not specify retain their default values.
For example, s = OptimizerSADEA([1;3],UseParallel=1) creates a
SADEA optimizer object with a single design variable with a lower bound of 1 and upper
bound of 3 and uses a parallel pool for optimization.
Input Arguments
Properties
Object Functions
checkExitCondition | Check exit status of optimizer |
defineInitialPopulation | Set initial population size |
getBestMemberData | View best member data after optimization |
getInitializationData | View optimizer member data at initialization |
getIterationData | View optimization data for completed iterations |
getNumberOfEvaluations | Get number of function evaluations performed |
isConverged | Check convergence status of optimizer |
isFunctionEvaluationsExhausted | Check function evaluations completion status |
optimize | Optimize custom evaluation function using specified parameters |
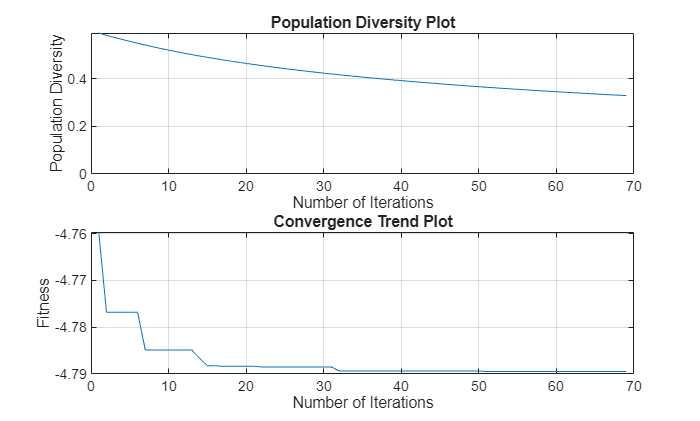
optimizeWithPlots | Optimize custom evaluation function and plot population density and convergence |
performRestore | Restore optimizer parameters to values from the previous successful iteration |
setMaxFunctionEvaluations | Set upper limit for number of function evaluations |
showConvergenceTrend | Plot optimization convergence trend |
validateSetup | Validate optimizer setup |
Examples
Create a dipole antenna resonating at 75 MHz and calculate its maximum directivity.
Choose its length and width as design variables. Provide lower and upper bounds of length and width.
referenceAnt = design(dipole,75e6); InitialDirectivity = max(max(pattern(referenceAnt,75e6)))
InitialDirectivity = 2.1002
length_lb = 3; % Lower bound for length length_ub = 7; % Upper bound for length width_lb = 0.11; % Lower bound for width width_ub = 0.13; % Upper bound for width Bounds = [length_lb width_lb; length_ub width_ub];
Use the SADEA optimizer to optimize this dipole antenna for its directivity. Specify an evaluation function for optimization using the CustomEvaluationFunction property of the OptimizerSADEA object. The evaluation function used in this example is defined at the end of this example.
s = OptimizerSADEA(Bounds); s.CustomEvaluationFunction = @customEvaluationOnlyObjective;
Validate the optimizer setup.
validateSetup(s)
ans = logical
1
Run the optimization for 100 iterations.
figure optimizeWithPlots(s,100);
View the best member data.
bestDesign = s.getBestMemberData
bestDesign =
bestMemberData with properties:
member: [4.8004 0.1100]
performances: -4.7895
fitness: -4.7895
bestIterationId: 72
bestDesignValues = bestDesign.member
bestDesignValues = 1×2
4.8004 0.1100
Update the reference antenna with best design values from the optimizer. Calculate directivity of the optimized design.
Observe an increase in directivity value after optimization.
referenceAnt.Length = bestDesignValues(1); referenceAnt.Width = bestDesignValues(2); postOptimizationDirectivity = max(max(pattern(referenceAnt,75e6)))
postOptimizationDirectivity = 4.7895
View the surrogate model data used for prediction.
InitialData = s.getInitializationData
InitialData =
initializationData with properties:
members: [30×2 double]
performances: [30×1 double]
fitness: [30×1 double]
View the data for all iterations.
iterData = s.getIterationData
iterData =
iterationData with properties:
members: [75×2 double]
performances: [75×1 double]
fitness: [75×1 double]
Check if the algorithm has converged.
ConvergenceFlag = s.isConverged
ConvergenceFlag = logical
1
Check how many times the evaluation function is computed.
numEvaluations = s.getNumberOfEvaluations
numEvaluations = 105
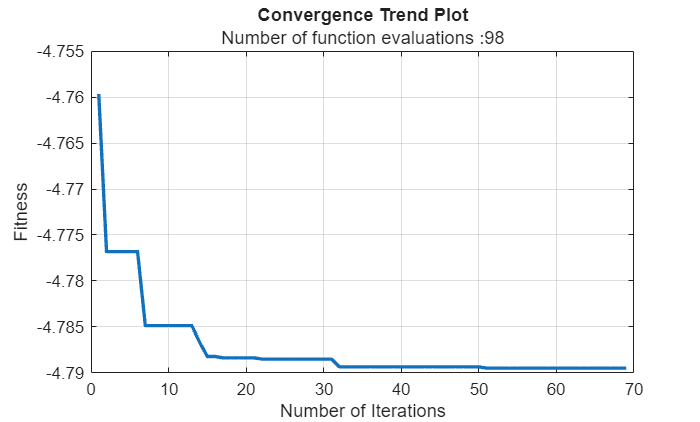
Plot the convergence trend.
s.showConvergenceTrend
This code defines the evaluation function used in this example.
function fitness = customEvaluationOnlyObjective(designVariables) % Create geometry ant = design(dipole,75e6); ant.Length = designVariables(1); ant.Width = designVariables(2); % Calculate directivity % Optimizer always minimizes the objective hence reverse the sign to maximize gain. objective = max(max(pattern(ant,75e6))); objective = -objective; % As there are no constraints, fitness equals objective. fitness = objective; end