step
Risposta al gradino di un sistema dinamico
Sintassi
Descrizione
step calcola la risposta al gradino a fronte di una variazione a gradino del valore di input da U a U + dU dopo td unità di tempo.

In questo caso,
t0 è il tempo di inizio della simulazione.
td è il ritardo del gradino.
U è il valore di input di base o bias.
dU è l'ampiezza del gradino.
Per impostazione predefinita, la funzione applica il gradino per t0 = 0, U = 0, dU = 1 e td = 0. Tuttavia, è possibile configurare questi valori utilizzando RespConfig. È inoltre possibile specificare lo stato iniziale x(t0). Quando non si specifica lo stato iniziale, step presume che il sistema sia inizialmente a riposo con livello di input U.
[ simula la risposta per i passi temporali specificati da y,tOut] = step(sys,t)t. Per definire i passi temporali, è possibile specificare:
Il tempo di simulazione finale utilizzando un valore scalare.
I tempi di simulazione iniziale e finale utilizzando un vettore a due elementi. (da R2023b)
Tutti i passi temporali utilizzando un vettore.
[ specifica ulteriori opzioni per il calcolo della risposta al gradino, come l'ampiezza del gradino o l'offset dell'input. Utilizzare y,tOut] = step(___,config)RespConfig per creare config.
step(___) traccia la risposta al gradino di sys con le opzioni di plottaggio predefinite per tutte le combinazioni di argomenti di input precedenti. Per ulteriori opzioni di personalizzazione dei grafici, utilizzare stepplot.
Per tracciare le risposte di più sistemi dinamici sullo stesso grafico, è possibile specificare
syscome un elenco di modelli separati da virgole. Ad esempio,step(sys1,sys2,sys3)traccia le risposte di tre modelli sullo stesso grafico.Per specificare un colore, uno stile della linea e un marcatore per ogni sistema nel grafico, specificare un valore
LineSpecper ciascun sistema. Ad esempio,step(sys1,LineSpec1,sys2,LineSpec2)traccia due modelli e ne specifica lo stile di plottaggio. Per ulteriori informazioni sulla specifica di un valoreLineSpec, vederestepplot.
Esempi
Tracciare la risposta al gradino di un sistema a tempo continuo rappresentato dalla seguente funzione di trasferimento.
Per questo esempio, creare un modello tf che rappresenti la funzione di trasferimento. È possibile tracciare in modo analogo la risposta al gradino di altri tipi di modelli di sistemi dinamici, come i modelli a guadagno zero-poli (zpk) o i modelli stato-spazio (ss).
sys = tf(4,[1 2 10]);
Tracciare la risposta al gradino.
step(sys)

Il grafico step include automaticamente una linea orizzontale tratteggiata che indica la risposta allo stato stazionario. In una finestra di figura di MATLAB®, è possibile fare clic con il tasto destro del mouse sul grafico per visualizzare altre caratteristiche di risposta al gradino, come la risposta di picco e il tempo di assestamento. Per ulteriori informazioni su queste caratteristiche, vedere stepinfo.
Tracciare la risposta al gradino di un sistema a tempo discreto. Il sistema ha un tempo di campionamento di 0,2 s ed è rappresentato dalle seguenti matrici stato-spazio.
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;Creare il modello stato-spazio e tracciarne la risposta al gradino.
sys = ss(A,B,C,D,0.2); step(sys)

La risposta al gradino riflette la discretizzazione del modello, mostrando la risposta calcolata ogni 0,2 secondi.
Esaminare la risposta al gradino della seguente funzione di trasferimento.
sys = zpk(-1,[-0.2+3j,-0.2-3j],1) * tf([1 1],[1 0.05])
sys =
(s+1)^2
----------------------------
(s+0.05) (s^2 + 0.4s + 9.04)
Continuous-time zero/pole/gain model.
Model Properties
step(sys)
Per impostazione predefinita, step sceglie un tempo finale che mostra lo stato stazionario verso cui tende la risposta. Questo sistema presenta tuttavia transitori rapidi che sono oscurati su questa scala temporale. Per osservare più da vicino la risposta transitoria, limitare il grafico a gradino a t = 15 s.
step(sys,15)


In alternativa, è possibile specificare gli istanti esatti in cui si desidera esaminare la risposta al gradino, purché siano separati da un intervallo costante. Ad esempio, osservare la risposta dalla fine del transitorio fino a quando il sistema raggiunge lo stato stazionario.
t = 20:0.2:120; step(sys,t)

Anche se questo grafico inizia a t = 20, step applica sempre l'input a gradino a t = 0.
Si consideri il seguente modello stato-spazio di secondo ordine:
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
Questo modello presenta due input e un output, quindi ha due canali: dal primo input all'output e dal secondo input all'output. Ogni canale ha la propria risposta al gradino.
Quando si utilizza step, vengono calcolate le risposte di tutti i canali.
step(sys)
Il grafico a sinistra mostra la risposta al gradino del primo canale di input, mentre quello a destra mostra la risposta al gradino del secondo canale di input. Ogni volta che si utilizza step per tracciare le risposte di un modello MIMO, questo genera un array di grafici che rappresentano tutti i canali I/O del modello. Ad esempio, creare un modello stato-spazio casuale con cinque stati, tre input e due output e tracciarne la risposta al gradino.
sys = rss(5,2,3); step(sys)


In una finestra di figura di MATLAB, è possibile limitare il grafico a un sottoinsieme di canali facendo clic con il tasto destro del mouse sul grafico e selezionando I/O Selector (Selettore I/O).
step consente di tracciare le risposte di più sistemi dinamici sullo stesso asse. Ad esempio, confrontate la risposta a loop chiuso di un sistema con un controller PI e un controller PID. Creare una funzione di trasferimento del sistema e sincronizzare i controller.
H = tf(4,[1 2 10]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Costruire i sistemi a loop chiuso e tracciare le loro risposte al gradino.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1); step(sys1,sys2) legend('PI','PID','Location','SouthEast')

Per impostazione predefinita, step sceglie colori distinti per ogni sistema che si traccia. È possibile specificare i colori e gli stili di linea utilizzando l'argomento di input LineSpec.
step(sys1,'r--',sys2,'b') legend('PI','PID','Location','SouthEast')

Il primo LineSpec 'r--' specifica una linea rossa tratteggiata per la risposta con il controller PI. Il secondo LineSpec 'b' specifica una linea blu continua per la risposta con il controller PID. La legenda riflette i colori e gli stili di linea specificati. Per ulteriori opzioni di personalizzazione dei grafici, utilizzare stepplot.
L'esempio precedente, confronto delle risposte di più sistemi, mostra come tracciare le risposte di diversi sistemi individuali su un singolo asse. Quando sono presenti più sistemi dinamici disposti in un array del modello, step traccia tutte le loro risposte contemporaneamente.
Creare un array del modello. Per questo esempio, utilizzare un array monodimensionale di funzioni di trasferimento del secondo ordine che presentano frequenze naturali diverse. Innanzitutto, preassegnare la memoria per l'array del modello. Il comando seguente crea una riga 1x5 di funzioni di trasferimento SISO a guadagno zero. Le prime due dimensioni rappresentano gli output e gli input del modello. Le restanti dimensioni sono le dimensioni dell'array.
sys = tf(zeros(1,1,1,5));
Popolare l'array.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
(Per ulteriori informazioni sugli array del modello e su come crearli, vedere Model Arrays.) Tracciare le risposte al gradino di tutti i modelli nell'array.
step(sys)

step utilizza lo stesso stile di linea per le risposte di tutte le voci dell'array. Un modo per distinguere le voci è l'utilizzo della proprietà SamplingGrid dei modelli di sistemi dinamici per associare ogni voce dell'array al valore w0 corrispondente.
sys.SamplingGrid = struct('frequency',w0);Ora, quando si tracciano le risposte in una finestra di figura di MATLAB, è possibile fare clic su una traccia per vedere a quale valore di frequenza corrisponde.
Quando si assegna un argomento di output, step restituisce un array dei dati della risposta. Per un sistema SISO, i dati della risposta vengono restituiti come vettore colonna di lunghezza pari al numero di punti temporali in cui la risposta viene campionata. È possibile fornire il vettore t dei punti temporali o lasciare che step selezioni i punti temporali in base alla dinamica del sistema. Ad esempio, estrarre la risposta al gradino di un sistema SISO in 101 punti temporali compresi tra t = 0 e t = 5 s.
sys = tf(4,[1 2 10]); t = 0:0.05:5; y = step(sys,t); size(y)
ans = 1×2
101 1
Per un sistema MIMO, i dati della risposta vengono restituiti in un array di dimensioni N x Ny x Nu, dove Ny e Nu sono il numero di output e input del sistema dinamico. Ad esempio, si consideri il seguente modello stato-spazio che rappresenta un sistema con due input e un output.
A = [-0.5572,-0.7814;0.7814,0]; B = [1,-1;0,2]; C = [1.9691,6.4493]; sys = ss(A,B,C,0);
Estrarre la risposta al gradino di questo sistema a 200 punti temporali compresi tra t = 0 e t = 20 s.
t = linspace(0,20,200); y = step(sys,t); size(y)
ans = 1×3
200 1 2
y(:,i,j) è un vettore colonna contenente la risposta al gradino dal j-esimo input all'i-esimo output ai tempi t. Ad esempio, estrarre la risposta al gradino dal secondo input all'output.
y12 = y(:,1,2); plot(t,y12)

Creare un loop di feedback con ritardo e tracciarne la risposta al gradino.
s = tf('s');
G = exp(-s) * (0.8*s^2+s+2)/(s^2+s);
sys = feedback(ss(G),1);
step(sys)
La risposta al gradino del sistema visualizzata è confusa. La risposta al gradino dei sistemi con ritardi interni può mostrare un comportamento anomalo, come salti ricorrenti. Tale comportamento è una feature del sistema e non un'anomalia del software.
Per impostazione predefinita, step applica un segnale di input che cambia da 0 a 1 a t = 0. Per personalizzare l'ampiezza e il bias, utilizzare RespConfig. Ad esempio, calcolare la risposta di un modello stato-spazio SISO a un segnale che cambia da 1 a –1 a t = 0.
A = [1.6 -0.7;
1 0];
B = [0.5; 0];
C = [0.1 0.1];
D = 0;
sys = ss(A,B,C,D,0.2);
opt = RespConfig;
opt.Bias = 1;
opt.Amplitude = -2;
step(sys,opt)
Per le risposte a segnali di input arbitrari, utilizzare lsim.
Confrontare la risposta al gradino di un modello parametrico identificato con un modello non parametrico (empirico). Visualizzare inoltre i 3 relativi intervalli di confidenza .
Caricare i dati.
load iddata1 z1
Stimare un modello parametrico.
sys1 = ssest(z1,4);
Stimare un modello non parametrico.
sys2 = impulseest(z1);
Tracciare le risposte al gradino per il confronto.
t = (0:0.1:10)'; [y1, ~, ~, ysd1] = step(sys1,t); [y2, ~, ~, ysd2] = step(sys2,t); plot(t, y1, 'b', t, y1+3*ysd1, 'b:', t, y1-3*ysd1, 'b:') hold on plot(t, y2, 'g', t, y2+3*ysd2, 'g:', t, y2-3*ysd2, 'g:')

Calcolare la risposta al gradino di un modello di serie temporale identificato.
Un modello di serie temporale, chiamato anche modello di segnale, è un modello senza segnali di input misurati. Il grafico a gradino di questo modello utilizza il suo canale di rumore (non misurato) come canale di input a cui viene applicato il segnale a gradino.
Caricare i dati.
load iddata9;Stimare un modello di serie temporale.
sys = ar(z9, 4);
sys è un modello di forma A y(t) = e(t), dove e(t) rappresenta il canale di rumore. Per il calcolo della risposta al gradino, e(t) viene trattato come un canale di input e viene denominato e@y1.
Tracciare la risposta al gradino.
step(sys)

Validare la linearizzazione di un modello ARX non lineare confrontando le risposte a gradino di ampiezza ridotta dei modelli lineari e non lineari.
Caricare i dati.
load iddata2 z2;
Stimare un modello ARX non lineare.
nlsys = nlarx(z2,[4 3 10],idTreePartition,'custom',... {'sin(y1(t-2)*u1(t))+y1(t-2)*u1(t)+u1(t).*u1(t-13)',... 'y1(t-5)*y1(t-5)*y1(t-1)'},'nlr',[1:5, 7 9]);
Determinare un punto di equilibrio operativo per nlsys corrispondente a un valore di input a stato stazionario di 1.
u0 = 1;
[X,~,r] = findop(nlsys, 'steady', 1);
y0 = r.SignalLevels.Output;Ottenere un'approssimazione lineare di nlsys in tale punto operativo.
sys = linearize(nlsys,u0,X);
Validare l'utilità di sys confrontando la sua risposta al gradino di ampiezza ridotta con quella di nlsys.
Il sistema non lineare nlsys funziona a un livello di equilibrio determinato da (u0,y0). Introdurre una perturbazione a gradino di grandezza 0,1 rispetto a questo stato stazionario e calcolare la risposta corrispondente.
opt = RespConfig; opt.InputOffset = u0; opt.Amplitude = 0.1; t = (0:0.1:10)'; ynl = step(nlsys, t, opt);
Il sistema lineare sys esprime la relazione tra le perturbazioni in input e la corrispondente perturbazione in output. Non tiene in considerazione i valori di equilibrio del sistema non lineare.
Tracciare la risposta al gradino del sistema lineare.
opt = RespConfig; opt.Amplitude = 0.1; yl = step(sys, t, opt);
Aggiungere l'offset di stato stazionario y0 alla risposta del sistema lineare e tracciare le risposte.
plot(t, ynl, t, yl+y0) legend('Nonlinear', 'Linear with offset')

Calcolare e tracciare la risposta al gradino di un modello LPV (lpvss). Questo esempio simula la risposta al gradino a loop chiuso di un modello di palla levitante definito in fcnMaglev.m a un disturbo .

Creare il modello e discretizzarlo.
hmin = 0.05; hmax = 0.25; h0 = (hmin+hmax)/2; Ts = 0.01; Glpv = lpvss("h",@fcnMaglev,0,0,h0); Glpvd = c2d(Glpv,Ts,"tustin");
Campionare il modello LPV per tre valori in altezza e sincronizzare un controller PID.
hpid = linspace(hmin,hmax,3);
[Ga,Goffset] = sample(Glpvd,[],hpid);
wc = 50;
Ka = pidtune(Ga,"pidf",wc);
Ka.Tf = 0.01;Creare il controller PID con pianificazione del guadagno.
Ka.SamplingGrid = struct("h",hpid); Koffset = struct("y",{Goffset.u}); Clpv = ssInterpolant(ss(Ka),Koffset);
Creare il modello a loop chiuso.
CL = feedback(Glpvd*[1,Clpv],1,2,1);
CL.InputName = {'du';'href'};
CL.OutputName = "h";Ottenere la corrente allo stato stazionario = per calcolare una grandezza appropriata per il disturbo a gradino all'input dell'impianto.
[~,~,~,~,~,~,~,u0] = Glpv.DataFunction(0,h0);
Calcolare e tracciare la risposta al disturbo dell'input e alla variazione a gradino del riferimento. Impostare i segnali di input di base = 0 e = per specificare la condizione dello stato stazionario iniziale.
t = 0:Ts:2; pFcn = @(k,x,u) x(1); Config = RespConfig( ... Bias=[0;h0], ... Amplitude=0.2*[u0;h0]*Ts, ... Delay=0.5, ... InitialParameter=h0); step(CL,t,pFcn,Config) title("Current Step Disturbance and Height Step Change")

Creare un modello stato-spazio con coefficienti complessi.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
Calcolare la risposta al gradino del sistema.
[y,t] = step(sys);
I dati della risposta risultanti contengono valori di output complessi.
y
Da R2026a
Questo esempio mostra perché la validazione mediante la variazione del tempo di campionamento è necessaria quando si simulano modelli con ritardi interni.
Caricare il modello.
load idelayModel.mat
sys.InternalDelayans = 0.5166
Determinare i margini di stabilità di sys. allmargin indica che la risposta a loop chiuso dovrebbe essere instabile.
s = allmargin(sys)
s = struct with fields:
GainMargin: [1.3867 0.9727 10.6798 20.1934 29.4912 38.7266 47.9352 57.1304 66.3172 75.4988 84.6770 93.8527 103.0266 112.1991 121.3705 130.5412 139.7111 148.8805 158.0495 167.2181 176.3864 185.5544 194.7221 203.8897 213.0571 222.2243 … ] (1×49 double)
GMFrequency: [0.0467 5.0880 15.2373 27.3818 39.5403 51.7014 63.8635 76.0266 88.1895 100.3526 112.5158 124.6791 136.8424 149.0058 161.1692 173.3326 185.4960 197.6594 209.8229 221.9864 234.1499 246.3134 258.4768 270.6404 282.8039 … ] (1×49 double)
PhaseMargin: [36.6926 -142.9664 113.4224 37.7140 -6.4674]
PMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
DelayMargin: [25.6083 13.0665 2.2403 0.1354 -0.0220]
DMFrequency: [0.0250 0.2899 0.8836 4.8597 5.1320]
Stable: 0
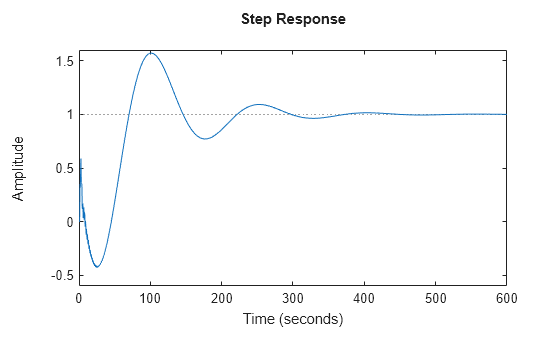
Quando si simula la risposta a loop chiuso con la grandezza predefinita del passo, la risposta appare stabile.
cl = feedback(sys,1); figure step(cl)
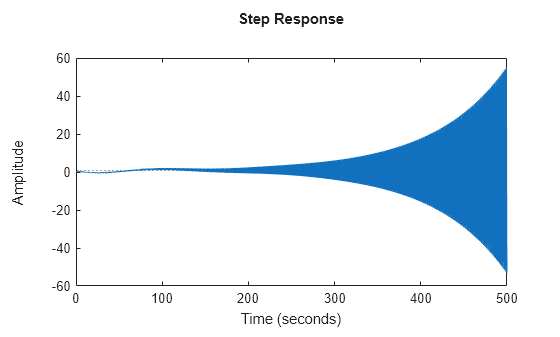
Tuttavia, quando si riduce la grandezza del passo, la risposta mostra instabilità.
figure step(cl,0:1e-2:500)
Per valutare se la grandezza del passo temporale selezionata sia sufficientemente piccola, è possibile confrontare la risposta in frequenza dei modelli continui e discretizzati variando la grandezza del passo.
sysd1_cl = c2d(cl,0.4,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
sysd2_cl = c2d(cl,0.01,'zoh');Warning: Discretization is only approximate due to internal delays. Use faster sampling rate if discretization error is large.
figure bodeplot(cl,sysd1_cl,sysd2_cl) legend("Continuous","Discrete (Ts = 0.4)","Discrete (Ts = 0.01)")
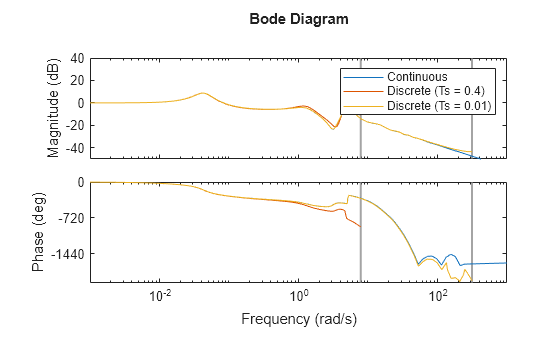
Un campionamento più lento non riesce a cogliere appieno la risonanza. La simulazione di modelli con ritardi interni si basa su una discretizzazione approssimativa; è quindi necessario validare che la grandezza del passo selezionata sia sufficientemente piccola, confrontando le risposte continue e discrete nel dominio della frequenza.
Argomenti di input
Argomenti di output
Suggerimenti
Per simulare le risposte del sistema a segnali di input arbitrari, utilizzare
lsim.Quando sono necessarie ulteriori opzioni di personalizzazione del grafico, utilizzare invece
stepplot.I grafici creati utilizzando
stepnon supportano titoli o etichette su più righe specificati come array di stringhe o array di celle di vettori di caratteri. Per specificare titoli ed etichette su più righe, utilizzare una singola stringa con un caratterenewline.step(sys,u,t) title("first line" + newline + "second line");
Algoritmi
Per ottenere campioni di modelli a tempo continuo senza ritardi interni, step converte tali modelli in modelli stato-spazio e li discretizza utilizzando un blocco di ordine zero sugli input. step sceglie automaticamente il tempo di campionamento per questa discretizzazione in base alla dinamica del sistema, tranne quando si fornisce il vettore di tempo di input t nella forma t = T0:dt:Tf. In tal caso, step utilizza dt come tempo di campionamento. I passi temporali di simulazione risultanti tOut sono ugualmente campionati con spaziatura dt.
Per i sistemi con ritardi interni, il software Control System Toolbox™ utilizza simulazioni basate su una discretizzazione approssimativa c2d. La precisione della simulazione migliora al diminuire del tempo di campionamento. Per un esempio, vedere Validate Simulation Results for Models with Internal Delays. (da R2026a)
Riferimenti
[1] L.F. Shampine and P. Gahinet, "Delay-differential-algebraic equations in control theory," Applied Numerical Mathematics, Vol. 56, Issues 3–4, pp. 574–588.