place
Progettazione del posizionamento dei poli
Descrizione
Il posizionamento dei poli è un metodo per calcolare la matrice di guadagno ottimale utilizzata per assegnare i poli a loop chiuso in posizioni specifiche, garantendo così la stabilità del sistema. Le posizioni dei poli a loop chiuso hanno un impatto diretto sulle caratteristiche delle risposte temporali, quali tempo di salita, tempo di assestamento e oscillazioni transitorie. Per ulteriori informazioni, vedere Posizionamento dei poli.
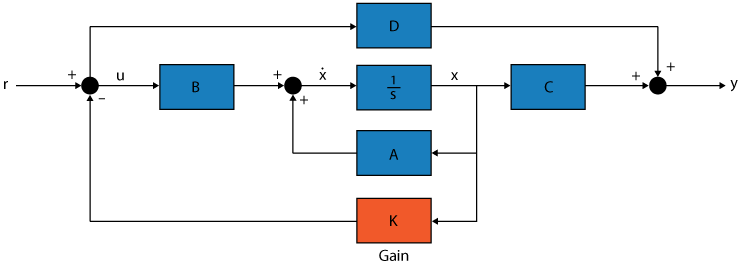
Dalla figura, si consideri un sistema dinamico lineare in forma stato-spazio
Per un dato vettore p con posizione desiderata dei poli autoconiugati a loop chiuso, place calcola una matrice di guadagno K tale che il feedback di stato u = –Kx ponga i poli nelle posizioni p. In altre parole, gli autovalori di A – BK corrisponderanno alle voci di p (fino all'ordinamento).
K = place(A,B,p)p calcolando una matrice di guadagno del feedback di stato K. Si assume che tutti gli input dell'impianto siano input di controllo. place funziona anche per i sistemi a più input e si basa sull'algoritmo da [1]. Questo algoritmo utilizza i gradi di libertà ulteriori per trovare una soluzione che minimizzi la sensibilità dei poli a loop chiuso alle perturbazioni in A o B.
[ restituisce inoltre K,prec] = place(A,B,p)prec, una stima dell'accuratezza di quanto strettamente gli autovalori di A – BK corrispondano alle posizioni specificate p (prec misura il numero di cifre decimali accurate nei poli effettivi a loop chiuso). Qualora un polo diverso da zero a loop chiuso si discosti di oltre il 10% dalla posizione desiderata, viene emesso un avviso.
Esempi
Per questo esempio, si consideri un semplice sistema del secondo ordine con le seguenti matrici stato-spazio:
Inserire le matrici e creare il sistema stato-spazio.
A = [-1,-2;1,0]; B = [2;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D);
Calcolare i poli a loop aperto e verificare la risposta al gradino del sistema a loop aperto.
Pol = pole(sys)
Pol = 2×1 complex
-0.5000 + 1.3229i
-0.5000 - 1.3229i
figure(1)
step(sys)
hold on;
Si noti che il sistema risultante è sottosmorzato. Pertanto, si scelgono poli reali nella metà sinistra del piano complesso per eliminare le oscillazioni.
p = [-1,-2];
Trovare la matrice di guadagno K utilizzando il posizionamento dei poli e verificare i poli a loop chiuso di syscl.
K = place(A,B,p); Acl = A-B*K; syscl = ss(Acl,B,C,D); Pcl = pole(syscl)
Pcl = 2×1
-2.0000
-1.0000
Confrontare ora la risposta al gradino del sistema a loop chiuso.
figure(1) step(syscl)
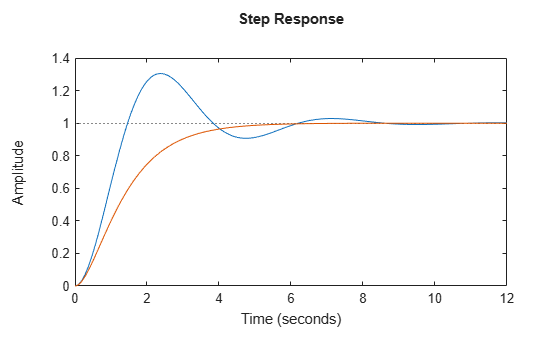
Pertanto, il sistema a loop chiuso ottenuto utilizzando il posizionamento dei poli è stabile con una buona risposta allo stato stazionario.
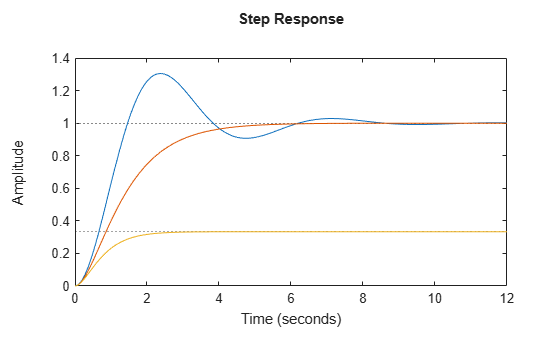
Si noti che la scelta di poli più lontani dall'asse immaginario consente di ottenere tempi di risposta più rapidi, ma riduce il guadagno allo stato stazionario del sistema. Ad esempio, si consideri l'utilizzo dei poli [-2,-3] per il sistema di cui sopra.
p = [-2, -3]; K2 = place(A,B,p); syscl2 = ss(A-B*K2,B,C,D); figure(1); step(syscl2);
stepinfo(syscl)
ans = struct with fields:
RiseTime: 2.5901
TransientTime: 4.6002
SettlingTime: 4.6002
SettlingMin: 0.9023
SettlingMax: 0.9992
Overshoot: 0
Undershoot: 0
Peak: 0.9992
PeakTime: 7.7827
stepinfo(syscl2)
ans = struct with fields:
RiseTime: 1.4130
TransientTime: 2.4766
SettlingTime: 2.4766
SettlingMin: 0.3003
SettlingMax: 0.3331
Overshoot: 0
Undershoot: 0
Peak: 0.3331
PeakTime: 4.1216
Per questo esempio, si considerino le posizioni dei poli [-2e-13,-3e-4,-3e-3]. Calcolare la precisione dei poli effettivi.
A = [4,2,1;0,-1,2;0,1e-8,1]; B = [1,2;3,1;1e-6,0]; p = [-2e-13,-3e-4,3e-3]; [~,prec] = place(A,B,p)
prec = 2
Si ottiene un valore di precisione pari a 2, che indica che le posizioni effettive dei poli sono precise fino a 2 cifre decimali.
Per questo esempio, si consideri la seguente funzione di trasferimento con poli a coniugazione complessa in corrispondenza di :
Inserire il modello di funzione di trasferimento. Quindi, convertirlo nella forma stato-spazio poiché place utilizza le matrici A e B come argomenti di input.
s = tf('s');
systf = 8/(s^2+4*s+2);
sys = ss(systf);Infine, calcolare la matrice di guadagno K utilizzando i poli coniugati complessi.
p = [-2+2i,-2-2i]; K = place(sys.A,sys.B,p)
K = 1×2
0 1.5000
I valori della matrice di guadagno sono reali poiché i poli sono auto-coniugati. I valori di K sarebbero complessi se p non contenesse poli auto-coniugati.
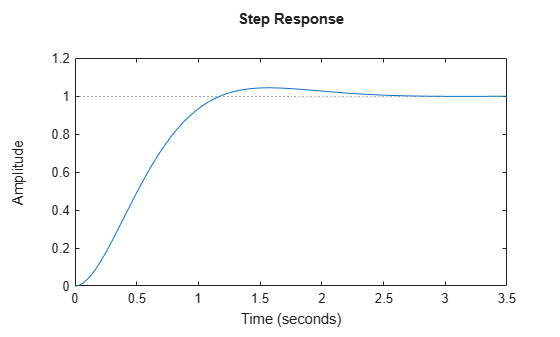
Verificare ora la risposta al gradino del sistema a loop chiuso.
syscl = ss(sys.A-sys.B*K,sys.B,sys.C,sys.D); step(syscl)
Per questo esempio, si consideri il seguente modello stato-spazio SISO:
Creare il modello stato-spazio SISO definito dalle seguenti matrici stato-spazio:
A = [-1,-0.75;1,0]; B = [1;0]; C = [1,1]; D = 0; Plant = ss(A,B,C,D);
Ora fornire un impulso all'impianto e simularlo utilizzando lsim. Tracciare l'output.
N = 250;
t = linspace(0,25,N);
u = [ones(N/2,1); zeros(N/2,1)];
x0 = [1;2];
[y,t,x] = lsim(Plant,u,t,x0);
figure
plot(t,y);
title('Output');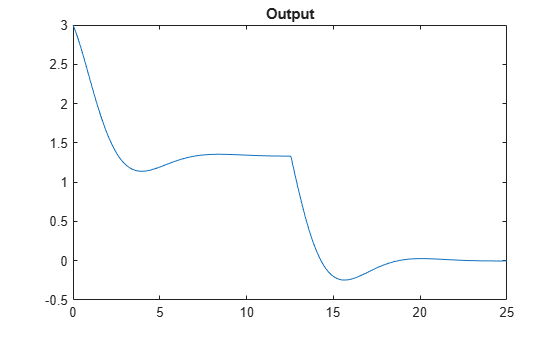
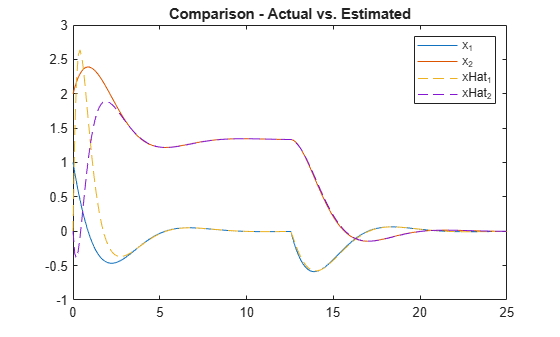
Per questo esempio, si supponga che tutte le variabili di stato non possano essere misurate e che venga misurato solo l'output. Pertanto, è necessario progettare un osservatore con questa misura. Utilizzare place per calcolare il guadagno dello stimatore trasponendo la matrice A e sostituendo C' alla matrice B. Per questa istanza, selezionare le posizioni desiderate dei poli a -2 e -3.
L = place(A',C',[-2,-3])';
Utilizzare il guadagno dello stimatore per sostituire le matrici di stato utilizzando il principio di dualità/separazione e creare il modello stato-spazio stimato.
At = A-L*C; Bt = [B,L]; Ct = [C;eye(2)]; sysObserver = ss(At,Bt,Ct,0);
Simulare la risposta temporale del sistema utilizzando lo stesso input a impulsi.
[observerOutput,t] = lsim(sysObserver,[u,y],t); yHat = observerOutput(:,1); xHat = observerOutput(:,[2 3]);
Confrontare la risposta del sistema effettivo e quella del sistema stimato.
figure; plot(t,x); hold on; plot(t,xHat,'--'); legend('x_1','x_2','xHat_1','xHat_2') title('Comparison - Actual vs. Estimated');
Argomenti di input
Argomenti di output
Suggerimenti
È possibile utilizzare
placeper la selezione del guadagno dello stimatore trasponendo la matriceAe sostituendoC'alla matriceBcome segue e come mostrato in Progettazione dell'osservatore di posizionamento del polo. È possibile utilizzare il guadagno dello stimatore risultante per i workflow dello stimatore di stato utilizzandoestim.
Riferimenti
[1] Kautsky, J., N.K. Nichols, and P. Van Dooren, "Robust Pole Assignment in Linear State Feedback," International Journal of Control, 41 (1985), pp. 1129-1155.
[2] Laub, A.J. and M. Wette, Algorithms and Software for Pole Assignment and Observers, UCRL-15646 Rev. 1, EE Dept., Univ. of Calif., Santa Barbara, CA, Sept. 1984.
Cronologia versioni
Introduzione prima di R2006a