extendedObjectMesh
Mesh representation of extended object
Description
The extendedObjectMesh represents the 3-D
geometry of an object. The 3-D geometry is represented by faces and vertices. Use these object
meshes to specify the geometry of an actor for simulating lidar sensor data using lidarPointCloudGenerator.
Creation
Syntax
Description
mesh = extendedObjectMesh('cuboid')extendedObjectMesh object, that defines a cuboid with unit
dimensions. The origin of the cuboid is located at its geometric center.
mesh = extendedObjectMesh('cylinder')
mesh = extendedObjectMesh('cylinder',n)n equally spaced vertices around its
circumference.
mesh = extendedObjectMesh('sphere')
mesh = extendedObjectMesh('sphere',n)n, of the
spherical mesh. The sphere mesh has (n +
1)2 - 2 vertices and
2n(n - 1) faces.
mesh = extendedObjectMesh(vertices,faces)vertices and
faces set the Vertices and
Faces properties respectively.
Properties
Object Functions
Use the object functions to develop new meshes.
translate | Translate mesh along coordinate axes |
rotate | Rotate mesh about coordinate axes |
scale | Scale mesh in each dimension |
applyTransform | Apply forward transformation to mesh vertices |
join | Join two object meshes |
scaleToFit | Auto-scale object mesh to match specified cuboid dimensions |
show | Display the mesh as a patch on the current axes |
Examples
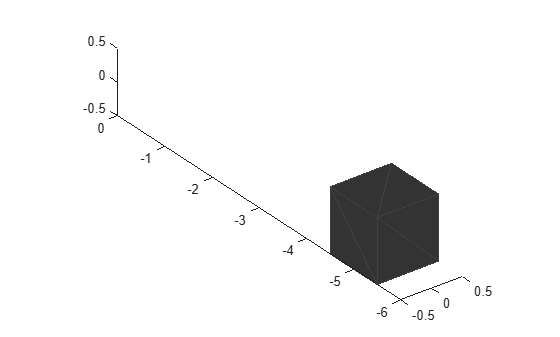
Create an extendedObjectMesh object and translate the object.
Construct a cuboid mesh.
mesh = extendedObjectMesh('cuboid');Translate the mesh by 5 units along the negative y axis.
mesh = translate(mesh,[0 -5 0]);
Visualize the mesh.
ax = show(mesh); ax.YLim = [-6 0];
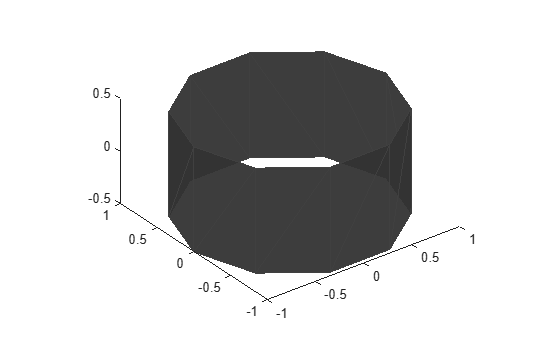
Create an extendedObjectMesh object and visualize the object.
Construct a cylinder mesh.
mesh = extendedObjectMesh('cylinder');Visualize the mesh.
ax = show(mesh);
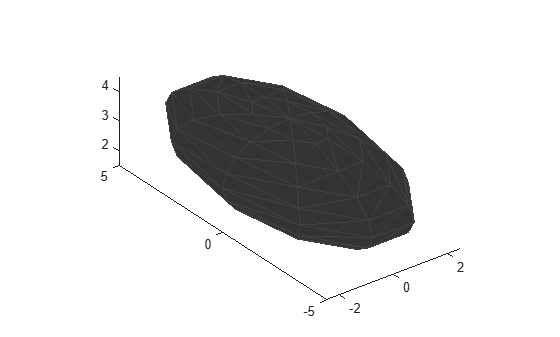
Create an extendedObjectMesh object and auto-scale the object to the required dimensions.
Construct a sphere mesh of unit dimensions.
sph = extendedObjectMesh('sphere');Auto-scale the mesh to the dimensions in dims.
dims = struct('Length',5,'Width',10,'Height',3,'OriginOffset',[0 0 -3]); sph = scaleToFit(sph,dims);
Visualize the mesh.
show(sph);
Tips
You can use the prebuilt meshes as a starting point to develop your own meshes. The table lists the details of the meshes.
driving.scenario.bicycleMesh | Mesh representation of bicycle in driving scenario |
driving.scenario.carMesh | Mesh representation of car in driving scenario. |
driving.scenario.pedestrianMesh | Mesh representation of pedestrian in driving scenario. |
driving.scenario.truckMesh | Mesh representation of truck in driving scenario. |
You can view the source files of the meshes to understand how to develop new meshes. At the MATLAB® command line, enter:
edit driving.scenario.XXXXMesh
XXXXMesh with the name of the mesh.Version History
Introduced in R2020a