ga
Trova il minimo della funzione usando l'algoritmo genetico
Sintassi
Descrizione
x = ga(fun,nvars)x, per la funzione obiettivo, fun . nvars è la dimensione (numero di variabili di progettazione) di fun .
Nota
Passing Extra Parameters spiega come passare parametri aggiuntivi alla funzione obiettivo e alle funzioni di vincolo non lineare, se necessario.
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon . La funzione nonlcon accetta x e restituisce i vettori C e Ceq, che rappresentano rispettivamente le disuguaglianze e le uguaglianze non lineari. ga minimizza fun in modo che C(x) ≤ 0 e Ceq(x) = 0 . (Impostare lb=[] e ub=[] se non esistono limiti.)
x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon)x = ga(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)intcon assumano valori interi.
Nota
In presenza di vincoli interi, ga non accetta vincoli di uguaglianza non lineare, ma solo vincoli di disuguaglianza non lineare.
Esempi
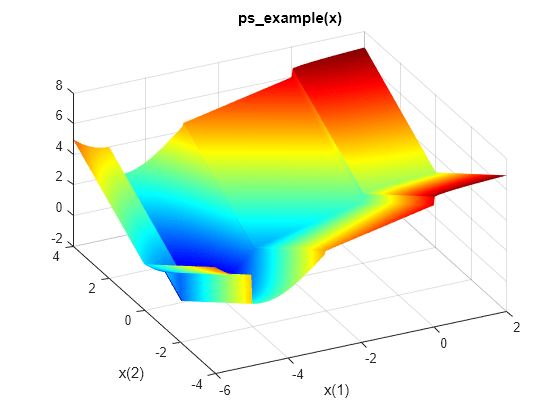
Quando si esegue questo esempio, viene incluso il file ps_example.m. Rappresenta graficamente la funzione.
xi = linspace(-6,2,300); yi = linspace(-4,4,300); [X,Y] = meshgrid(xi,yi); Z = ps_example([X(:),Y(:)]); Z = reshape(Z,size(X)); surf(X,Y,Z,'MeshStyle','none') colormap 'jet' view(-26,43) xlabel('x(1)') ylabel('x(2)') title('ps\_example(x)')
Trova il minimo di questa funzione usando ga .
rng default % For reproducibility x = ga(@ps_example,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6793 -0.0860
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example sulla regione x(1) + x(2) >= 1 e x(2) <= 5 + x(1). Questa funzione è inclusa quando si esegue questo esempio.
Per prima cosa, convertiamo i due vincoli di disuguaglianza nella forma matriciale A*x <= b . In altre parole, prendi le variabili x sul lato sinistro della disuguaglianza e rendi entrambe le disuguaglianze minori o uguali:
-x(1) -x(2) <= -1
-x(1) + x(2) <= 5
A = [-1,-1;
-1,1];
b = [-1;5];Risolvi il problema vincolato usando ga .
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
0.9990 0.0000
I vincoli sono soddisfatti entro il valore predefinito della tolleranza del vincolo, 1e-3. Per vederlo, calcola A*x' - b, che dovrebbe avere componenti negative.
disp(A*x' - b)
0.0010 -5.9990
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example sulla regione x(1) + x(2) >= 1 e x(2) == 5 + x(1). Questa funzione è inclusa quando si esegue questo esempio.
Per prima cosa, convertiamo i due vincoli nella forma matriciale A*x <= b e Aeq*x = beq. In altre parole, prendi le variabili x sul lato sinistro delle espressioni e trasforma la disuguaglianza nella forma minore o uguale:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Risolvi il problema vincolato usando ga .
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-2.0005 2.9995
Verificare che i vincoli siano soddisfatti entro il valore predefinito di ConstraintTolerance, 1e-3.
disp(A*x' - b)
1.0000e-03
disp(Aeq*x' - beq)
8.5897e-09
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example sulla regione x(1) + x(2) >= 1 e x(2) == 5 + x(1). Quando si esegue questo esempio, viene inclusa la funzione ps_example. Inoltre, impostare i limiti 1 <= x(1) <= 6 e -3 <= x(2) <= 8.
Per prima cosa, convertiamo i due vincoli lineari nella forma matriciale A*x <= b e Aeq*x = beq. In altre parole, prendi le variabili x sul lato sinistro delle espressioni e trasforma la disuguaglianza nella forma minore o uguale:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Imposta i limiti lb e ub .
lb = [1 -3]; ub = [6 8];
Risolvi il problema vincolato usando ga .
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,lb,ub)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
1.0000 6.0000
Verificare che i vincoli lineari siano soddisfatti entro il valore predefinito di ConstraintTolerance, 1e-3.
disp(A*x' - b)
-6.0000
disp(Aeq*x' - beq)
-7.9765e-08
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example sulla regione e . Quando si esegue questo esempio, viene inclusa la funzione ps_example.
Per farlo, utilizzare la funzione ellipsecons.m che restituisce il vincolo di disuguaglianza nel primo output, c, e il vincolo di uguaglianza nel secondo output, ceq. Quando si esegue questo esempio, viene inclusa la funzione ellipsecons. Esaminare il codice ellipsecons.
type ellipseconsfunction [c,ceq] = ellipsecons(x) c = 2*x(1)^2 + x(2)^2 - 3; ceq = (x(1)+1)^2 - (x(2)/2)^4;
Includere una funzione handle per ellipsecons come argomento nonlcon.
nonlcon = @ellipsecons; fun = @ps_example; rng default % For reproducibility x = ga(fun,2,[],[],[],[],[],[],nonlcon)
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
-0.9766 0.0362
Verificare che i vincoli non lineari siano soddisfatti in x . I vincoli sono soddisfatti quando c ≤ 0 e ceq = 0 entro il valore predefinito di ConstraintTolerance, 1e-3 .
[c,ceq] = nonlcon(x)
c = -1.0911
ceq = 5.4645e-04
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example sulle regioni x(1) + x(2) >= 1 e x(2) == 5 + x(1) utilizzando una tolleranza di vincolo inferiore a quella predefinita. Quando si esegue questo esempio, viene inclusa la funzione ps_example.
Per prima cosa, convertiamo i due vincoli nella forma matriciale A*x <= b e Aeq*x = beq. In altre parole, prendi le variabili x sul lato sinistro delle espressioni e trasforma la disuguaglianza nella forma minore o uguale:
-x(1) -x(2) <= -1
-x(1) + x(2) == 5
A = [-1 -1]; b = -1; Aeq = [-1 1]; beq = 5;
Per ottenere una soluzione più accurata, impostare una tolleranza di vincolo pari a 1e-6. Per monitorare i progressi del risolutore, imposta una funzione di grafico.
options = optimoptions('ga','ConstraintTolerance',1e-6,'PlotFcn', @gaplotbestf);
Risolvere il problema di minimizzazione.
rng default % For reproducibility fun = @ps_example; x = ga(fun,2,A,b,Aeq,beq,[],[],[],options)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.

x = 1×2
-2.0000 3.0000
Verificare che i vincoli lineari siano soddisfatti entro 1e-6 .
disp(A*x' - b)
9.9809e-07
disp(Aeq*x' - beq)
-7.3589e-08
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example soggetta al vincolo che x(1) sia un numero intero. Questa funzione è inclusa quando si esegue questo esempio.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
Utilizzare l'algoritmo genetico per minimizzare un problema non lineare vincolato a numeri interi. Ottenere sia la posizione del minimo che il valore minimo della funzione. Quando si esegue questo esempio, viene inclusa la funzione obiettivo ps_example.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon)
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
Confronta questo risultato con la soluzione del problema senza vincoli.
[x,fval] = ga(fun,2)
ga stopped because the average change in the fitness value is less than options.FunctionTolerance.
x = 1×2
-4.6906 -0.0078
fval = -1.9918
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example vincolata ad avere valori interi x(1). Quando si esegue questo esempio, viene inclusa la funzione ps_example. Per comprendere il motivo per cui il risolutore si è fermato e come ga ha cercato un minimo, ottenere i risultati exitflag e output. Inoltre, tracciare il grafico del valore minimo osservato della funzione obiettivo man mano che il risolutore procede.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; options = optimoptions('ga','PlotFcn', @gaplotbestf); [x,fval,exitflag,output] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)

ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
x = 1×2
-5.0000 -0.0834
fval = -1.8344
exitflag = 1
output = struct with fields:
problemtype: 'integerconstraints'
rngstate: [1x1 struct]
generations: 86
funccount: 3311
message: 'ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and ...'
maxconstraint: 0
hybridflag: []
Utilizzare l'algoritmo genetico per minimizzare la funzione ps_example vincolata ad avere valori interi x(1). Quando si esegue questo esempio, viene inclusa la funzione ps_example. Ottenere tutti gli output, inclusa la popolazione finale e il vettore dei punteggi.
intcon = 1; rng default % For reproducibility fun = @ps_example; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; [x,fval,exitflag,output,population,scores] = ga(fun,2,A,b,Aeq,beq,lb,ub,nonlcon,intcon);
ga stopped because the average change in the penalty function value is less than options.FunctionTolerance and the constraint violation is less than options.ConstraintTolerance.
Esaminare i primi 10 membri della popolazione finale e i punteggi corrispondenti. Si noti che x(1) ha valore intero per tutti i membri della popolazione. L'algoritmo intero ga genera solo popolazioni fattibili a livello intero.
disp(population(1:10,:))
1.0e+03 *
-0.0050 -0.0001
-0.0050 -0.0001
-1.6420 0.0027
-1.5070 0.0010
-0.4540 0.0104
-0.2530 -0.0011
-0.1210 -0.0003
-0.1040 0.1314
-0.0140 -0.0010
0.0160 -0.0002
disp(scores(1:10))
1.0e+06 *
-0.0000
-0.0000
2.6798
2.2560
0.2016
0.0615
0.0135
0.0099
0.0001
0.0000
Argomenti di input
Argomenti di output
Ulteriori informazioni
Suggerimenti
Per scrivere una funzione con parametri aggiuntivi alle variabili indipendenti che possono essere chiamate da
ga, vedere Passing Extra Parameters.Per i problemi che utilizzano il tipo di popolazione
Double Vector(predefinito),ganon accetta funzioni i cui input sono di tipocomplex. Per risolvere problemi che coinvolgono dati complessi, scrivi le tue funzioni in modo che accettino vettori reali, separando la parte reale da quella immaginaria.
Algoritmi
Per una descrizione dell'algoritmo genetico, vedere Come funziona l'algoritmo genetico .
Per una descrizione dell'algoritmo di programmazione mista intera, vedere Integer ga Algorithm .
Per una descrizione degli algoritmi di vincolo non lineare, vedere Nonlinear Constraint Solver Algorithms for Genetic Algorithm .
Funzionalità alternativa
Applicazione
L'attività Ottimizza Live Editor fornisce un'interfaccia visiva per ga .
Riferimenti
[1] Goldberg, David E., Genetic Algorithms in Search, Optimization & Machine Learning, Addison-Wesley, 1989.
[2] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds”, SIAM Journal on Numerical Analysis, Volume 28, Number 2, pages 545–572, 1991.
[3] A. R. Conn, N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Barrier Algorithm for Optimization with General Inequality Constraints and Simple Bounds”, Mathematics of Computation, Volume 66, Number 217, pages 261–288, 1997.