gamultiobj
Trova il fronte di Pareto di più funzioni di fitness utilizzando l'algoritmo genetico
Sintassi
Descrizione
x = gamultiobj(fun,nvars)x su Fronte di Pareto delle funzioni obiettivo definite in fun. nvars è la dimensione del problema di ottimizzazione (numero di variabili decisionali). La soluzione x è locale, il che significa che potrebbe non trovarsi sul fronte di Pareto globale.
Nota
Passing Extra Parameters spiega come passare parametri aggiuntivi alla funzione obiettivo e alle funzioni di vincolo non lineare, se necessario.
x = gamultiobj(fun,nvars,A,b,Aeq,beq)x soggetto alle uguaglianze lineari e alle disequazioni lineari , vedere Linear Equality Constraints. (Impostare A = [] e b = [] se non esistono disuguaglianze.) gamultiobj supporta vincoli lineari solo per l'opzione PopulationType predefinita ('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub)x in modo che un insieme di Pareto locale venga trovato nell'intervallo lb ≤ x ≤ ub, vedere Bound Constraints. Utilizzare matrici vuote per Aeq e beq se non esistono vincoli di uguaglianza lineare. gamultiobj supporta vincoli vincolati solo per l'opzione PopulationType predefinita ('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon . La funzione nonlcon accetta x e restituisce i vettori c e ceq, che rappresentano rispettivamente le disuguaglianze e le uguaglianze non lineari. gamultiobj minimizza fun in modo che c(x) ≤ 0 e ceq(x) = 0 . (Impostare lb = [] e ub = [] se non esistono limiti.) gamultiobj supporta vincoli non lineari solo per l'opzione PopulationType predefinita ('doubleVector').
x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon)x = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options)intcon assumano valori interi.
Nota
In presenza di vincoli interi, gamultiobj non accetta vincoli di uguaglianza non lineare, ma solo vincoli di disuguaglianza non lineare.
Esempi
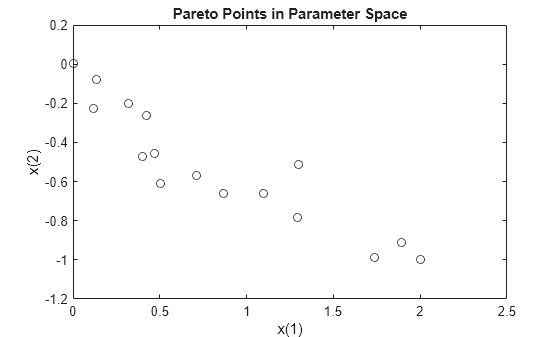
Trova il fronte di Pareto per un semplice problema multiobiettivo. Ci sono due obiettivi e due variabili decisionali x .
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
Trova il fronte di Pareto per questa funzione obiettivo.
rng default % For reproducibility x = gamultiobj(fitnessfcn,2);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Rappresenta graficamente i punti della soluzione.
plot(x(:,1),x(:,2),'ko') xlabel('x(1)') ylabel('x(2)') title('Pareto Points in Parameter Space')
Per vedere l'effetto di un vincolo lineare su questo problema, vedere Problema multiobiettivo con vincolo lineare .
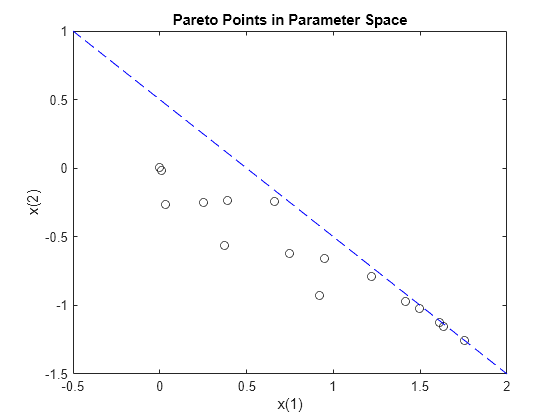
Questo esempio mostra come trovare il fronte di Pareto per un problema multiobiettivo in presenza di un vincolo lineare.
Ci sono due funzioni obiettivo e due variabili decisionali x .
fitnessfcn = @(x)[norm(x)^2,0.5*norm(x(:)-[2;-1])^2+2];
Il vincolo lineare è .
A = [1,1]; b = 1/2;
Trova il fronte di Pareto.
rng default % For reproducibility x = gamultiobj(fitnessfcn,2,A,b);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Rappresenta graficamente la soluzione vincolata e il vincolo lineare.
plot(x(:,1),x(:,2),'ko') t = linspace(-1/2,2); y = 1/2 - t; hold on plot(t,y,'b--') xlabel('x(1)') ylabel('x(2)') title('Pareto Points in Parameter Space') hold off
Per vedere l'effetto della rimozione del vincolo lineare da questo problema, vedere Problema multiobiettivo semplice .
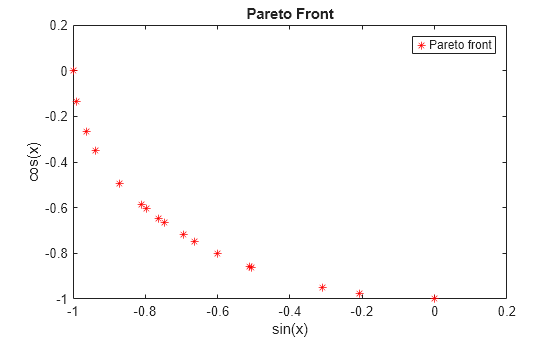
Trova il fronte di Pareto per le due funzioni di fitness sin(x) e cos(x) sull'intervallo .
fitnessfcn = @(x)[sin(x),cos(x)]; nvars = 1; lb = 0; ub = 2*pi; rng default % for reproducibility x = gamultiobj(fitnessfcn,nvars,[],[],[],[],lb,ub)
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
x = 18×1
4.7124
4.7124
3.1415
3.6733
3.9845
3.4582
3.9098
4.4409
4.0846
3.8686
⋮
Rappresenta graficamente la soluzione. gamultiobj trova i punti lungo l'intero fronte di Pareto.
plot(sin(x),cos(x),'r*') xlabel('sin(x)') ylabel('cos(x)') title('Pareto Front') legend('Pareto front')
Trova e traccia il fronte di Pareto per la seconda funzione di Schaffer a due obiettivi. Questa funzione ha un fronte di Pareto disconnesso.
Copia questo codice in un file di funzione nel percorso MATLAB ®.
function y = schaffer2(x) % y has two columns % Initialize y for two objectives and for all x y = zeros(length(x),2); % Evaluate first objective. % This objective is piecewise continuous. for i = 1:length(x) if x(i) <= 1 y(i,1) = -x(i); elseif x(i) <=3 y(i,1) = x(i) -2; elseif x(i) <=4 y(i,1) = 4 - x(i); else y(i,1) = x(i) - 4; end end % Evaluate second objective y(:,2) = (x -5).^2;
Traccia i due obiettivi.
x = -1:0.1:8; y = schaffer2(x); plot(x,y(:,1),'r',x,y(:,2),'b'); xlabel x ylabel 'schaffer2(x)' legend('Objective 1','Objective 2')

Le due funzioni obiettivo competono per x negli intervalli [1,3] e [4,5] . Tuttavia, il fronte Pareto-ottimale è costituito solo da due regioni disconnesse, corrispondenti a x negli intervalli [1,2] e [4,5]. Ci sono regioni disconnesse perché la regione [2,3] è inferiore a [4,5]. In quell'intervallo, l'obiettivo 1 ha gli stessi valori, ma l'obiettivo 2 è più piccolo.
Imposta limiti per mantenere i membri della popolazione nell'intervallo ![]() .
.
lb = -5; ub = 10;
Imposta le opzioni per visualizzare il fronte di Pareto mentre viene eseguito gamultiobj.
options = optimoptions('gamultiobj','PlotFcn',@gaplotpareto);
Chiama gamultiobj .
rng default % For reproducibility [x,fval,exitflag,output] = gamultiobj(@schaffer2,1,[],[],[],[],lb,ub,options);
gamultiobj stopped because it exceeded options.MaxGenerations.

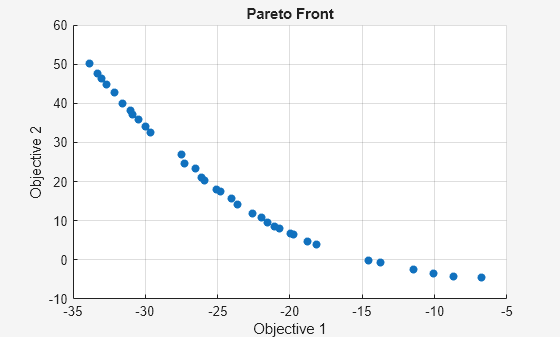
Creare una funzione a due obiettivi in due variabili del problema.
rng default % For reproducibility M = diag([-1 -1]) + randn(2)/4; % Two problem variables fun = @(x)[(x').^2 / 30 + M*x']; % Two objectives
Specificare che la seconda variabile deve essere un numero intero.
intcon = 2;
Specificare i limiti del problema, la funzione del grafico gaplotpareto e una dimensione della popolazione pari a 100.
lb = [0 0]; ub = [100 50]; options = optimoptions("gamultiobj","PlotFcn","gaplotpareto",... "PopulationSize",100);
Trova l'insieme di Pareto per il problema.
nvars = 2; A = []; b = []; Aeq = []; beq = []; nonlcon = []; [x,fval] = gamultiobj(fun,nvars,A,b,Aeq,beq,lb,ub,nonlcon,intcon,options);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Elenca dieci delle soluzioni e nota che la seconda variabile ha valore intero.
x(1:10,:)
ans = 10×2
8.3393 28.0000
12.9927 49.0000
7.1611 27.0000
7.0210 18.0000
0.0004 12.0000
9.0989 44.0000
9.3974 29.0000
0.5537 17.0000
6.4010 17.0000
7.0531 31.0000
Esegui un semplice problema multiobiettivo e ottieni tutti gli output disponibili.
Impostare il generatore di numeri casuali per la riproducibilità.
rng default
Impostare le funzioni di fitness su kur_multiobjective, una funzione che ha tre variabili di controllo e restituisce due valori di funzione di fitness.
fitnessfcn = @kur_multiobjective; nvars = 3;
La funzione kur_multiobjective ha il seguente codice.
function y = kur_multiobjective(x) %KUR_MULTIOBJECTIVE Objective function for a multiobjective problem. % The Pareto-optimal set for this two-objective problem is nonconvex as % well as disconnected. The function KUR_MULTIOBJECTIVE computes two % objectives and returns a vector y of size 2-by-1. % % Reference: Kalyanmoy Deb, "Multi-Objective Optimization using % Evolutionary Algorithms", John Wiley & Sons ISBN 047187339 % Copyright 2007 The MathWorks, Inc. % Initialize for two objectives y = zeros(2,1); % Compute first objective for i = 1:2 y(1) = y(1) - 10*exp(-0.2*sqrt(x(i)^2 + x(i+1)^2)); end % Compute second objective for i = 1:3 y(2) = y(2) + abs(x(i))^0.8 + 5*sin(x(i)^3); end
Imposta limiti inferiori e superiori per tutte le variabili.
ub = [5 5 5]; lb = -ub;
Trova il fronte di Pareto e tutti gli altri output per questo problema.
[x,fval,exitflag,output,population,scores] = gamultiobj(fitnessfcn,nvars, ...
[],[],[],[],lb,ub);
gamultiobj stopped because the average change in the spread of Pareto solutions is less than options.FunctionTolerance.
Esaminare le dimensioni di alcune delle variabili restituite.
sizex = size(x) sizepopulation = size(population) sizescores = size(scores)
sizex =
18 3
sizepopulation =
50 3
sizescores =
50 2
Il fronte di Pareto restituito contiene 18 punti. La popolazione finale è composta da 50 membri. Ogni riga population ha tre dimensioni, corrispondenti alle tre variabili decisionali. Ogni riga scores ha due dimensioni, corrispondenti alle due funzioni di fitness.
Argomenti di input
Argomenti di output
Ulteriori informazioni
Un fronte di Pareto è un insieme di punti nello spazio dei parametri (lo spazio delle variabili decisionali) che hanno valori della funzione di idoneità non inferiori.

In altre parole, per ogni punto del fronte di Pareto è possibile migliorare una funzione di fitness solo peggiorandone un'altra. Per i dettagli, vedere What Is Multiobjective Optimization?
Come in Local vs. Global Optima, è possibile che un fronte di Pareto sia locale, ma non globale. "Locale" significa che i punti di Pareto possono essere non inferiori rispetto ai punti vicini, ma i punti più lontani nello spazio dei parametri potrebbero avere valori di funzione inferiori in ogni componente.
Algoritmi
gamultiobj utilizza un algoritmo genetico controllato ed elitario (una variante di NSGA-II [1]). Un GA elitario favorisce sempre gli individui con un migliore valore di fitness (rango). Un'AG elitaria controllata favorisce anche gli individui che possono contribuire ad aumentare la diversità della popolazione, anche se hanno un valore di fitness inferiore. È importante mantenere la diversità della popolazione per convergere verso un fronte di Pareto ottimale. La diversità viene mantenuta controllando i membri più elitari della popolazione man mano che l'algoritmo progredisce. Due opzioni, ParetoFraction e DistanceMeasureFcn, controllano l'elitarismo. ParetoFraction limita il numero di individui sul fronte di Pareto (membri dell'élite). La funzione distanza, selezionata da DistanceMeasureFcn, aiuta a mantenere la diversità su un fronte favorendo gli individui che sono relativamente lontani sul fronte. L'algoritmo si arresta se lo spread, una misura del movimento del fronte di Pareto, è piccolo. Per i dettagli, vedere gamultiobj Algorithm .
Funzionalità alternativa
Applicazione
L'attività Ottimizza Live Editor fornisce un'interfaccia visiva per gamultiobj .
Riferimenti
[1] Deb, Kalyanmoy. Multi-Objective Optimization Using Evolutionary Algorithms. Chichester, England: John Wiley & Sons, 2001.
Funzionalità estese
Cronologia versioni
Introdotto in R2007b