Object Detection and Classification
Lidar Toolbox™ functions enable you to detect objects in point clouds and classify them into predefined categories using deep learning networks. You can use the PointPillars and Voxel R-CNN networks for object detection, and the PointNet++ network for object classification. You can train these networks, or use the available pretrained networks and further tune them for your application. The toolbox also includes processes for CUDA® MEX code generation for the PointPillars and SqueezeSegV2 networks.

Functions
Topics
- Deep Learning with Point Clouds
Learn point cloud processing using deep learning.
- Get Started with PointPillars
Define PointPillars network and learn how to perform object detection using the same.
- Get Started with Voxel R-CNN
Define voxel region-based convolutional neural network (Voxel R-CNN) and learn how to perform object detection using the same.
- Datastores for Deep Learning (Deep Learning Toolbox)
Learn how to use datastores in deep learning applications.
- List of Deep Learning Layers (Deep Learning Toolbox)
Discover all the deep learning layers in MATLAB®.
Featured Examples
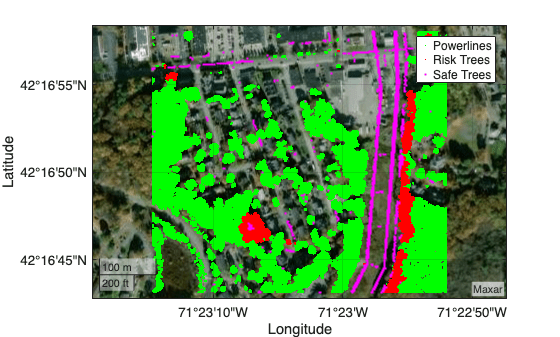
Detect Risk Trees Near Power Lines
Use point cloud data collected from aerial lidar scanning (ALS) to detect at-risk trees near power lines.

Determine Safe Landing Area for Aerial Vehicles
Demonstrates how to determine a safe landing area for aerial vehicles, such as helicopters and UAVs, by using aerial lidar data.

Lidar Object Detection Using Complex-YOLO v4 Network
Detect objects in point clouds using you only look once version 4 (YOLO v4) deep learning network. In this example, you:

Code Generation for Lidar Object Detection Using SqueezeSegV2 Network
Generate CUDA® MEX code for a lidar object detection network. In the example, you first segment the point cloud with a pretrained network, then cluster the points and fit 3-D bounding boxes to each cluster. Finally, you generate MEX code for the network.

Lidar 3-D Object Detection Using PointPillars Deep Learning
Train a PointPillars network for object detection in point clouds.

Code Generation for Lidar Object Detection Using PointPillars Deep Learning
Generate CUDA® MEX for a PointPillars object detector. For more information, see Lidar 3-D Object Detection Using PointPillars Deep Learning example from the Lidar Toolbox™.

Data Augmentations for Lidar Object Detection Using Deep Learning
Perform typical data augmentation techniques for 3-D object detection workflows with lidar data.

Lane Detection in 3-D Lidar Point Cloud
Detect lanes in lidar point clouds. You can use the intensity values returned from lidar point clouds to detect ego vehicle lanes. You can further improve the lane detection by using a curve-fitting algorithm and tracking the curve parameters. Lidar lane detection enables you to build complex workflows like lane keep assist, lane departure warning, and adaptive cruise control for autonomous driving. A test vehicle collects the lidar data using a lidar sensor mounted on its rooftop.

Curb Detection and Tracking in 3-D Lidar Point Cloud
Detect and track curbs in lidar point clouds. A curb is a line of stone or concrete, that connects the roadway to the sidewalk. Curbs act as delimiters for the drivable area of the road.

Detect, Classify, and Track Vehicles Using Lidar
Detect, classify, and track vehicles by using lidar point cloud data captured by a lidar sensor mounted on an ego vehicle.

Track Vehicles Using Lidar: From Point Cloud to Track List
Track vehicles using measurements from a lidar sensor mounted on top of an ego vehicle. Lidar sensors report measurements as a point cloud. The example illustrates the workflow in MATLAB® for processing the point cloud and tracking the objects. For a Simulink® version of the example, refer to Track Vehicles Using Lidar Data in Simulink (Sensor Fusion and Tracking Toolbox).The lidar data used in this example is recorded from a highway driving scenario. In this example, you use the recorded data to track vehicles with a joint probabilistic data association (JPDA) tracker and an interacting multiple model (IMM) approach.

Track-Level Fusion of Radar and Lidar Data
Generate an object-level track list from measurements of a radar and a lidar sensor and further fuse them using a track-level fusion scheme. You process the radar measurements using an extended object tracker and the lidar measurements using a joint probabilistic data association (JPDA) tracker. You further fuse these tracks using a track-level fusion scheme. The schematic of the workflow is shown below.

Transfer Learning Using Voxel R-CNN for Lidar 3-D Object Detection
Detect 3-D objects in lidar data by using transfer learning with voxel region-based convolutional neural network (Voxel R-CNN).
Point Cloud Classification Using PointNet++ Deep Learning
Classify 3-D objects in point cloud data by using a PointNet++ deep learning network.