alphaShape
Polygons and polyhedra from points in 2-D and 3-D
Description
An alphaShape creates a bounding area or
volume that envelops a set of 2-D or 3-D points. You can manipulate the alphaShape object to tighten or loosen the fit around the
points to create a nonconvex region. You also can add or remove points or suppress holes
or regions.
After you create an alphaShape object, you can
perform geometric queries. For example, you can determine if a point is inside the shape
or you can find the number of regions that make up the shape. You also can calculate
useful quantities like area, perimeter, surface area, or volume, and plot the shape for
visual inspection.
Creation
To create an alphaShape object, use the
alphaShape function with input arguments that define the
shape's vertices. You also can specify an alpha radius and hole or region thresholds
when you create the alphaShape.
Syntax
Description
shp = alphaShape(x,y)(x,y) using the
default alpha radius. The default alpha radius produces the tightest fitting
alpha shape, which encloses all of the points.
shp represents a polygon. The polygon has no isolated
points or edges, nor does it have dangling edges.
shp = alphaShape(___,a)a using any of the
arguments in the previous syntaxes.
shp = alphaShape(___,Name,Value)Name,Value
pair arguments. For example, you can suppress interior holes or voids using
'HoleThreshold'.
Input Arguments
Name-Value Arguments
Properties
Object Functions
alphaSpectrum | Alpha values giving distinct alpha shapes |
criticalAlpha | Alpha radius defining critical transition in shape |
numRegions | Number of regions in alpha shape |
inShape | Determine if point is inside alpha shape |
alphaTriangulation | Triangulation that fills alpha shape |
boundaryFacets | Boundary facets of alpha shape |
perimeter | Perimeter of 2-D alpha shape |
area | Area of 2-D alpha shape |
surfaceArea | Surface area of 3-D alpha shape |
volume | Volume of 3-D alpha shape |
plot | Plot alpha shape |
nearestNeighbor | Determine nearest alpha shape boundary point |
Examples
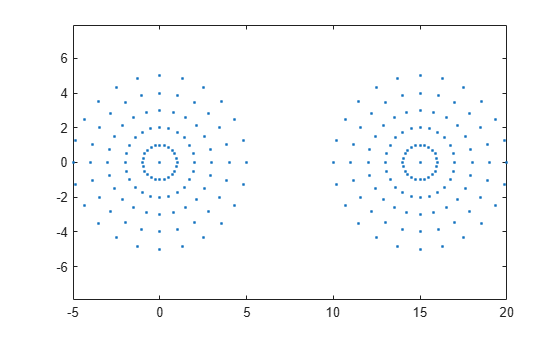
Find the shape of a 2-D point cloud of data.
Create and plot a set of 2-D points.
th = (pi/12:pi/12:2*pi)'; x1 = [reshape(cos(th)*(1:5), ... numel(cos(th)*(1:5)),1); 0]; y1 = [reshape(sin(th)*(1:5), ... numel(sin(th)*(1:5)),1); 0]; x = [x1;x1+15]; y = [y1;y1]; plot(x,y,".") axis equal
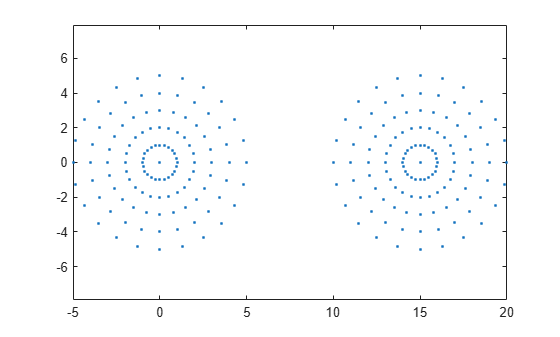
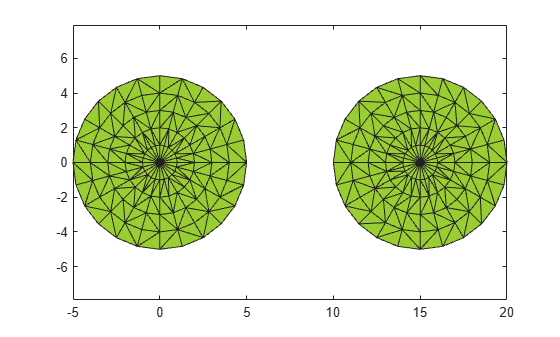
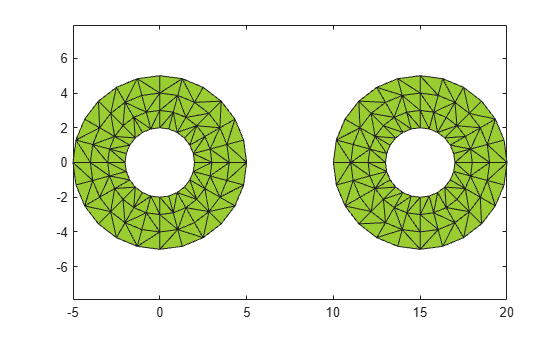
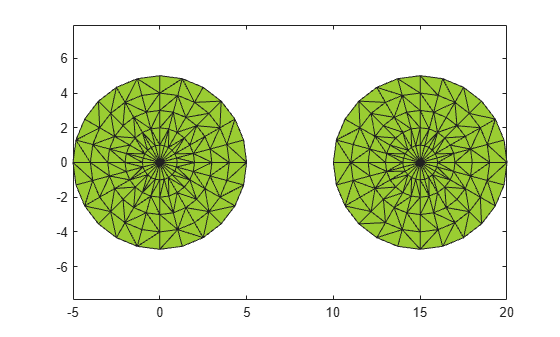
Compute an alpha shape for the point set using the default alpha radius.
shp = alphaShape(x,y); plot(shp)

Check the value of the default alpha radius.
shp.Alpha
ans = 0.7752
The default alpha radius results in an alpha shape with a jagged boundary. To better capture the boundary of the point set, try a larger alpha radius.
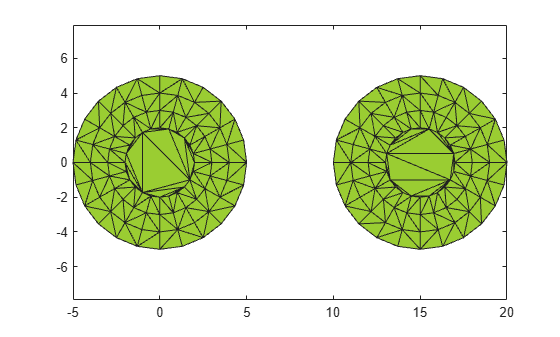
Compute an alpha shape using an alpha value of 2.5.
shp.Alpha = 2.5; plot(shp)
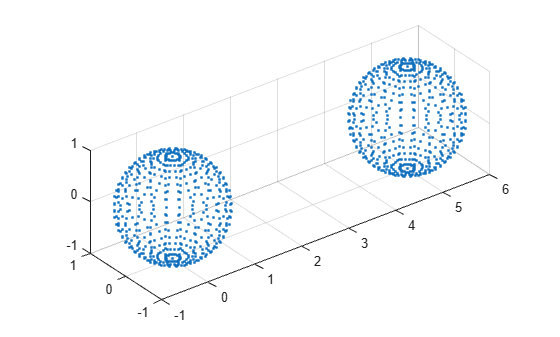
Find the shape of a 3-D point cloud of data.
Create and plot a set of 3-D points.
[x1,y1,z1] = sphere(24); x1 = x1(:); y1 = y1(:); z1 = z1(:); x2 = x1+5; P = [x1 y1 z1; x2 y1 z1]; P = unique(P,"rows"); plot3(P(:,1),P(:,2),P(:,3),".") axis equal grid on
Compute a 3-D alpha shape using an alpha radius of 1.
shp = alphaShape(P(:,1),P(:,2),P(:,3),1);
plot(shp)
axis equal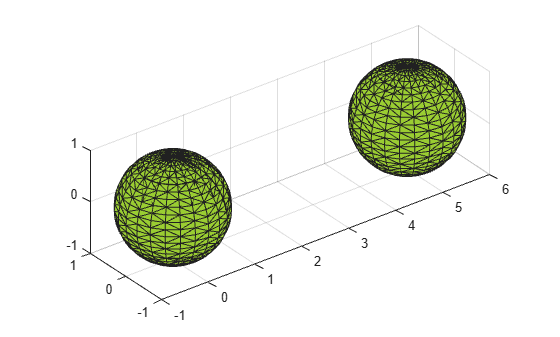
Create an alpha shape by specifying its alpha radius, and fill the holes in an alpha shape.
Create and plot a 2-D set of points.
th = (pi/12:pi/12:2*pi)'; x1 = [reshape(cos(th)*(2:5), ... numel(cos(th)*(2:5)),1);]; y1 = [reshape(sin(th)*(2:5), ... numel(sin(th)*(2:5)),1);]; x = [x1;x1+15;]; y = [y1;y1]; plot(x,y,".") axis equal

Compute an alpha shape for the point set using an alpha radius of 1.
shp = alphaShape(x,y,1); plot(shp)
An alpha radius of 1 results in an alpha shape with two regions containing holes. To suppress the small holes in the alpha shape, you can specify a HoleThreshold by estimating the area of the largest hole to fill. To fill all holes in the shape, you can assign an arbitrarily large value to HoleThreshold.
Create a new alpha shape that suppresses the holes by specifying a HoleThreshold of 15.
shp = alphaShape(x,y,1,HoleThreshold=15); plot(shp)
Control the number of regions of an alpha shape by setting a region threshold.
Create and plot a set of 3-D points.
[x1,y1,z1] = sphere(24);
x1 = x1(:);
y1 = y1(:);
z1 = z1(:);
x2 = x1 + 5;
[x3,y3,z3] = sphere(5);
x3 = x3(:) + 5;
y3 = y3(:);
z3 = z3(:) + 25;
P = [x1 y1 z1;
x2 y1 z1;
0.25*x3 0.25*y3 0.25*z3];
P = unique(P,"rows");
plot3(P(:,1),P(:,2),P(:,3),".")
axis equal
grid on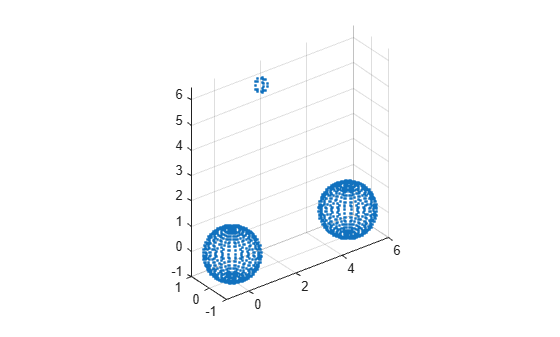
Compute an alpha shape for the point set using an alpha radius of 1.
shp = alphaShape(P,1);
plot(shp)
axis equal
In this case, the alpha shape produces a small region above the two equal-sized spheres. To suppress this region, you can specify a RegionThreshold by estimating its volume.
Specify a RegionThreshold of 2. The resulting shape contains only the two larger regions.
shp.RegionThreshold = 2;
plot(shp)
axis equal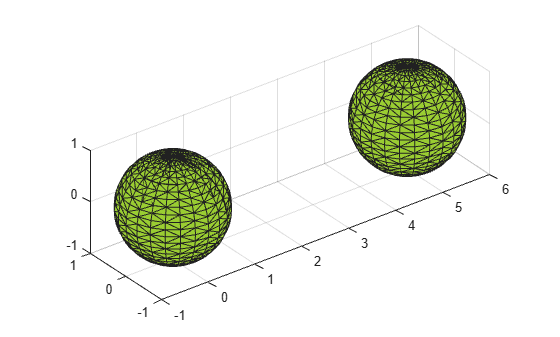
Add points to an existing alpha shape.
Create and plot a 2-D set of points.
th = (pi/12:pi/12:2*pi)'; x1 = [reshape(cos(th)*(1:5), ... numel(cos(th)*(1:5)),1); 0]; y1 = [reshape(sin(th)*(1:5), ... numel(sin(th)*(1:5)),1); 0]; x = [x1;x1+15;]; y = [y1;y1]; plot(x,y,".") axis equal
Compute an alpha shape for the point set using an alpha radius of 1. The resulting alpha shape has two regions.
shp = alphaShape(x,y,1); plot(shp)
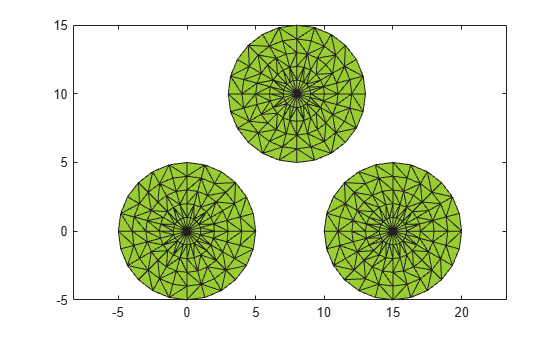
Now add a third region to the alpha shape by adding new points directly to the shp.Points matrix.
x3 = x1 + 8; y3 = y1 + 10; shp.Points(end+1,:) = [x3 y3]; plot(shp)
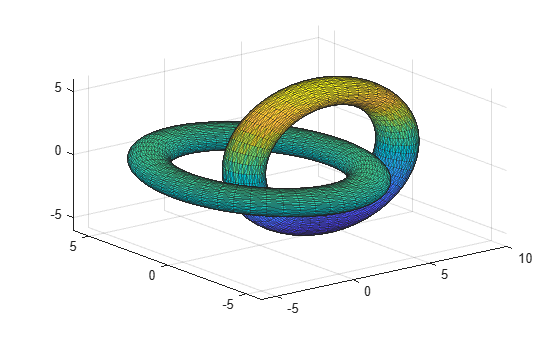
Create a triangulation representing two intersecting rings and write the result to an STL file.
To represent the first ring, define a torus surface with the internal radius of 1 and external radius of 5.
R = 5;
r = 1;
angle = linspace(0,2*pi,50);
angle(end) = []; % Omit the repeated point for 0 and 2pi
[theta,omega] = meshgrid(angle,angle);Define the coordinates x, y, and z to represent a torus.
X = (R+r.*cos(theta)).*cos(omega); Y = (R+r.*cos(theta)).*sin(omega); Z = r.*sin(theta);
Create an alphaShape object with an alpha radius of 2.
shp = alphaShape(X(:),Y(:),Z(:),2);
Extract triangulation from the boundary surface of alphaShape. This triangulation represents the first ring.
[tri,xyz] = shp.boundaryFacets; t1 = triangulation(tri,xyz);
Define the second ring by rotating the triangulation.
t2 = triangulation(tri,xyz*[1 0 0;0 0 1;0 1 0] + [4 0 0]);
Combine the two triangulations.
Points = [t1.Points;t2.Points];
Connectivity = ...
[t1.ConnectivityList;
t2.ConnectivityList + size(t1.Points,1)];
trCombined = triangulation(Connectivity,Points);Plot the resulting triangulation.
p = trisurf(trCombined); p.EdgeAlpha = 0.4;
Create an STL file from the triangulation.
stlwrite(trCombined,"Rings.stl");Extended Capabilities
Version History
Introduced in R2014b