plannerAStarGrid
A* pianificatore di percorsi per mappa a griglia
Descrizione
L'oggetto plannerAStarGrid crea un pianificatore di percorsi A*. Il pianificatore esegue una ricerca A* su una mappa di occupazione e trova il percorso più breve e privo di ostacoli tra le posizioni di partenza e di arrivo specificate nella griglia, come determinato dal costo euristico.
Creazione
Sintassi
Descrizione
planner = plannerAStarGridplannerAStarGrid con un oggetto binaryOccupancyMap utilizzando una larghezza e un'altezza di 10 metri e una risoluzione della griglia di 1 cella per metro.
planner = plannerAStarGrid(map)plannerAStarGrid utilizzando l'oggetto mappa specificato map. Specificare map come oggetto binaryOccupancyMap o occupancyMap. L'input map imposta il valore della proprietà Map.
planner = plannerAStarGrid(___,Name,Value)
Ad esempio, plannerAStarGrid(map,'GCost','Manhattan') crea un oggetto pianificatore di percorsi A* utilizzando la funzione di costo Manhattan.
Proprietà
Funzioni oggetto
Esempi
Pianifica il percorso più breve e privo di collisioni attraverso una mappa a griglia di ostacoli utilizzando l'algoritmo di pianificazione del percorso A*.
Genera un oggetto binaryOccupancyMap con ostacoli sparsi casualmente utilizzando la funzione mapClutter.
rng('default');
map = mapClutter;Utilizzare la mappa per creare un oggetto plannerAStarGrid.
planner = plannerAStarGrid(map);
Definire i punti di partenza e di arrivo.
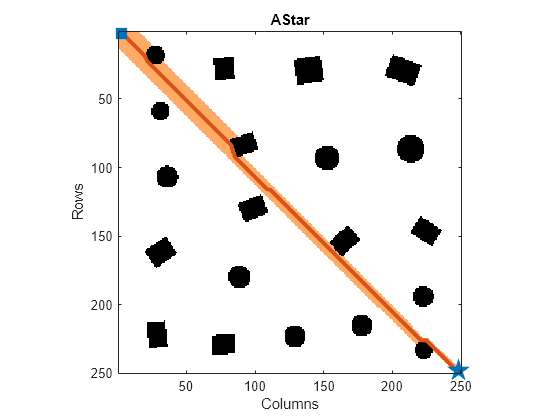
start = [2 3]; goal = [248 248];
Pianifica un percorso dal punto di partenza al punto di arrivo.
plan(planner,start,goal);
Visualizza il percorso e i nodi esplorati utilizzando la funzione oggetto show.
show(planner)
Funzionalità estese
Cronologia versioni
Introdotto in R2020b
Vedi anche
binaryOccupancyMap | occupancyMap | plannerRRT | plannerRRTStar | plannerHybridAStar