Mappatura
Le mappe di occupazione vengono utilizzate per rappresentare gli ostacoli in un ambiente e definire i limiti del tuo mondo. È possibile creare mappe e aggiornare la posizione degli ostacoli in base alle letture dei sensori utilizzando il raycasting. Sincronizzare con le mappe esistenti e sposta i frame locali per creare mappe personalizzate che seguono il tuo veicolo. Le mappe supportano valori binari e probabilistici per le mappe 2D e una rappresentazione probabilistica per le mappe 3D.
Utilizza queste mappe insieme a Pianificazione del movimento per pianificare percorsi in una mappa oppure utilizza gli algoritmi per stimare la posizione del tuo veicolo in un ambiente.
Funzioni
Argomenti
- Occupancy Grids
Details of occupancy grid functionality and map structure.
- Fuse Multiple Lidar Sensors Using Map Layers
Occupancy maps offer a simple yet robust way of representing an environment for robotic applications by mapping the continuous world-space to a discrete data structure.
- Build Occupancy Map from Depth Images Using Visual Odometry and Optimized Pose Graph
This example shows how to reduce the drift in the estimated trajectory (location and orientation) of a monocular camera using 3-D pose graph optimization.
Esempi in primo piano

Create Egocentric Occupancy Maps Using Range Sensors
Occupancy Maps offer a simple yet robust way of representing an environment for robotic applications by mapping the continuous world-space to a discrete data structure. Individual grid cells can contain binary or probabilistic information, where 0 indicates free-space, and 1 indicates occupied space. You can build up this information over time using sensor measurements and efficiently store them in the map. This information is also useful for more advanced workflows, such as collision detection and path planning.

Create Egocentric Occupancy Map from Driving Scenario Designer
Create an egocentric occupancy map from the Driving Scenario Designer app. This example uses obstacle information from the vision detection generator to update the egocentric occupancy map.
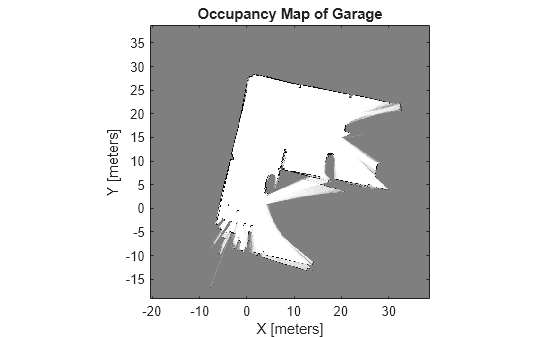
Costruisci una mappa di occupazione da scansioni e pose LiDAR
La funzione buildMap accetta le letture della scansione LiDAR e le pose associate per creare una griglia di occupazione come oggetti lidarScan e le pose [x y theta] associate per creare un occupancyMap.