link
Add link analysis objects to transmitter
Description
link( adds asset1,asset2,...,assetN)Link analysis
objects defined by nodes asset1, asset2, and so
on.
Note
Link method analysis is based on free-space propagation and does not take into account terrain or building obstructions.
lnk = link(___,Name=Value)
lnk = link(___)
Examples
Create a satellite scenario object.
startTime = datetime(2020,11,25,0,0,0);
stopTime = startTime + days(1);
sampleTime = 60; % seconds
sc = satelliteScenario(startTime,stopTime,sampleTime)sc =
satelliteScenario with properties:
StartTime: 25-Nov-2020
StopTime: 26-Nov-2020
SampleTime: 60
AutoSimulate: 1
Satellites: [1×0 matlabshared.satellitescenario.Satellite]
GroundStations: [1×0 matlabshared.satellitescenario.GroundStation]
Platforms: [1×0 matlabshared.satellitescenario.Platform]
Viewers: [0×0 matlabshared.satellitescenario.Viewer]
AutoShow: 1
Add a satellite to the scenario.
semiMajorAxis = 10000000; % meters eccentricity = 0; inclination = 60; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 0; % degrees sat = satellite(sc,semiMajorAxis,eccentricity,inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly,Name="Satellite");
Add gimbals to the satellite. These gimbals enable the satellite receiver antenna to steer to the first ground station, and its transmitter antenna to steer to the second ground station.
gimbalrxSat = gimbal(sat); gimbaltxSat = gimbal(sat);
Add a receiver to the first gimbal of the satellite.
gainToNoiseTemperatureRatio = 5; % dB/K systemLoss = 3; % dB rxSat = receiver(gimbalrxSat,Name="Satellite Receiver",GainToNoiseTemperatureRatio= ... gainToNoiseTemperatureRatio,SystemLoss=systemLoss)
rxSat =
Receiver with properties:
Name: Satellite Receiver
ID: 4
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
Antenna: [1x1 satcom.satellitescenario.GaussianAntenna]
SystemLoss: 3 decibels
PreReceiverLoss: 3 decibels
GainToNoiseTemperatureRatio: 5 decibels/Kelvin
RequiredEbNo: 10 decibels
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Add a transmitter to the second gimbal of the satellite.
frequency = 27e9; % Hz power = 20; % dBW bitRate = 20; % Mbps systemLoss = 3; % dB txSat = transmitter(gimbaltxSat,Name="Satellite Transmitter",Frequency=frequency, ... power=power,BitRate=bitRate,SystemLoss=systemLoss)
txSat =
Transmitter with properties:
Name: Satellite Transmitter
ID: 5
MountingLocation: [0; 0; 0] meters
MountingAngles: [0; 0; 0] degrees
Antenna: [1x1 satcom.satellitescenario.GaussianAntenna]
SystemLoss: 3 decibels
Frequency: 2.7e+10 Hertz
BitRate: 20 Mbps
Power: 20 decibel-watts
Links: [1x0 satcom.satellitescenario.Link]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
Specify the antenna specifications of the repeater.
dishDiameter = 0.5; % meters
apertureEfficiency = 0.5;
gaussianAntenna(txSat,DishDiameter=dishDiameter,ApertureEfficiency=apertureEfficiency);
gaussianAntenna(rxSat,DishDiameter=dishDiameter,ApertureEfficiency=apertureEfficiency);Add two ground stations to the scenario.
gs1 = groundStation(sc,Name="Ground Station 1"); latitude = 52.2294963; % degrees longitude = 0.1487094; % degrees gs2 = groundStation(sc,latitude,longitude,Name="Ground Station 2");
Point gimbals of the satellite towards the two ground stations for the simulation duration.
pointAt(gimbaltxSat,gs2); pointAt(gimbalrxSat,gs1);
Add gimbals to the ground stations. These gimbals enable the ground station antennas to steer towards the satellite.
gimbalgs1 = gimbal(gs1); gimbalgs2 = gimbal(gs2);
Add a transmitter to ground station gs1.
frequency = 30e9; % Hz power = 40; % dBW bitRate = 20; % Mbps txGs1 = transmitter(gimbalgs1,Name="Ground Station 1 Transmitter",Frequency=frequency, ... Power=power,BitRate=bitRate);
Add a receiver to ground station gs2.
requiredEbNo = 14; % dB rxGs2 = receiver(gimbalgs2,Name="Ground Station 2 Receiver",RequiredEbNo=requiredEbNo);
Define the antenna specifications of the ground stations.
dishDiameter = 5; % meters
gaussianAntenna(txGs1,DishDiameter=dishDiameter);
gaussianAntenna(rxGs2,DishDiameter=dishDiameter);Point gimbals of the ground stations towards the satellite for the simulation duration.
pointAt(gimbalgs1,sat); pointAt(gimbalgs2,sat);
Add link analysis to transmitter txGs1.
lnk = link(txGs1,rxSat,txSat,rxGs2)
lnk =
Link with properties:
Sequence: [10 4 5 11]
LineWidth: 2
LineColor: [0.3922 0.8314 0.0745]
Determine the times when ground station gs1 can send data to ground station gs2 via the satellite.
linkIntervals(lnk)
ans=4×8 table
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 1 25-Nov-2020 00:20:00 25-Nov-2020 00:40:00 1200 NaN NaN
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 2 25-Nov-2020 03:19:00 25-Nov-2020 03:36:00 1020 NaN NaN
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 3 25-Nov-2020 06:15:00 25-Nov-2020 06:36:00 1260 NaN NaN
"Ground Station 1 Transmitter" "Ground Station 2 Receiver" 4 25-Nov-2020 22:20:00 25-Nov-2020 22:38:00 1080 NaN NaN
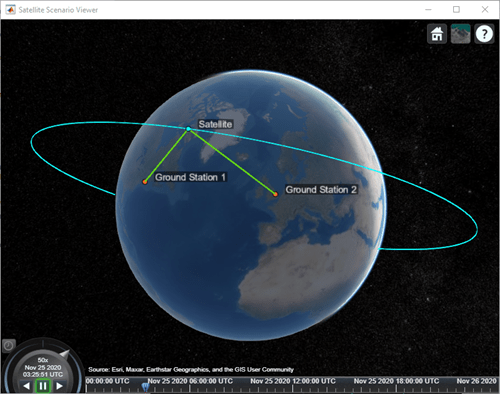
Visualize the link by using the Satellite Scenario Viewer.
play(sc);
The example shows a scenario where the link and link intervals change with the change in inclination of the satellite.
startTime = datetime(2024,6,1,0,0,0);
stopTime = startTime + hours(4);
sampleTime = 60;% seconds
sc = satelliteScenario(startTime,stopTime,sampleTime);Add satellite 1 to the scenario and a transmitter to it.
sat1 = satellite(sc,10e6,0,0,0,0,0,Name="Satellite 1"); txSat1 = transmitter(sat1,Name="Satellite 1 Transmitter");
Add satellite 2 to the scenario and a receiver to it.
sat2= satellite(sc,10e6,0,0,10,0,0,Name="Satellite 2"); rxSat2 = receiver(sat2,Name="Satellite 2 Receiver");
Add a ground station to the scenario.
latitude = 49.8728; % degrees longitude = 8.6512; % degrees gs = groundStation(sc,latitude,longitude,Name="Ground Station");
Point the two satellite at the ground station.
pointAt(sat1,gs) pointAt(sat2,gs)
Add gimbals to the ground station.
gimbalrxGs = gimbal(gs); gimbaltxGs = gimbal(gs);
Add transmitter and receiver to the ground station.
rxGs = receiver(gimbalrxGs,Name="Ground Station Receiver"); txGs = transmitter(gimbaltxGs,Name="Ground Station Transmitter");
Point ground station transmitter and receiver to the satellite.
pointAt(gimbalrxGs,sat1) pointAt(gimbaltxGs,sat2)
Calculate the link between the ground station and satellites.
lnk1 = link(txSat1,rxGs,txGs,rxSat2)
lnk1 =
Link with properties:
Sequence: [2 8 9 4]
LineWidth: 2
LineColor: [0.3922 0.8314 0.0745]
Find the link intervals.
linkIntervals(lnk1)
ans=1×8 table
"Satellite 1 Transmitter" "Satellite 2 Receiver" 1 01-Jun-2024 02:10:00 01-Jun-2024 02:14:00 240 1 1
Link interval from lnk1 shows that a valid link exists from satellite1 to satellite2 going through the ground station for a period of 7560 seconds.
Update the scenario so that satellites are pointing at each other.
pointAt(sat1,sat2) pointAt(sat2,sat1)
Calculate the link interval for lnk1 with the updated scenario.
linkIntervals(lnk1)
ans =
0×8 empty table
Source Target IntervalNumber StartTime EndTime Duration StartOrbit EndOrbit
______ ______ ______________ _________ _______ ________ __________ ________
The linkInterval from lnk1 shows no intervals exist for the duration of the scenario as the ground station is no longer pointed at by either satellite antenna.
Create a new link object, lnk2, from satellite 1 directly to satellite 2.
lnk2 = link(txSat1,rxSat2)
lnk2 =
Link with properties:
Sequence: [2 4]
LineWidth: 2
LineColor: [0.3922 0.8314 0.0745]
Calculate the link interval for lnk2 in the updated scenario.
linkIntervals(lnk2)
ans=1×8 table
"Satellite 1 Transmitter" "Satellite 2 Receiver" 1 01-Jun-2024 01-Jun-2024 04:00:00 14400 1 2
Shows a link interval over the entire scenario because the satellites are pointed at each other for the entire scenario.
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2021a