sldv.prove
Proof objective function for Stateflow charts and MATLAB Function blocks
Syntax
Description
sldv.prove( specifies that
expr)expr is true for every evaluation while proving properties.
Use any valid Boolean expression for
expr.
This function has no output and
no impact on its parenting function, other than
any indirect side effects of evaluating
expr. If you issue this function from the MATLAB® command line, the function has no
effect.
Intersperse sldv.prove proof assumptions within the code or
separate the assumptions into a verification script.
Examples
Specify a property proof objective and proof assumption in
the model sldvdemo_sbr_verification by using a MATLAB
Function block.
The command below opens an example in which
sldvdemo_sbr_verification model is attached. Open the
model.
openExample('sldv/SldvexCCallerBlockExample') Save sldvdemo_sbr_verification as
ex_sldvdemo_sbr_verification.
Open the Safety Properties subsystem.
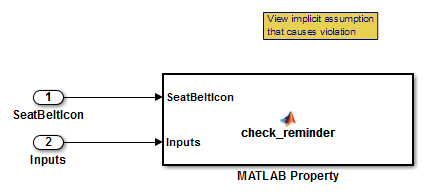
Open the MATLAB Property block, which is a
MATLAB Function block.
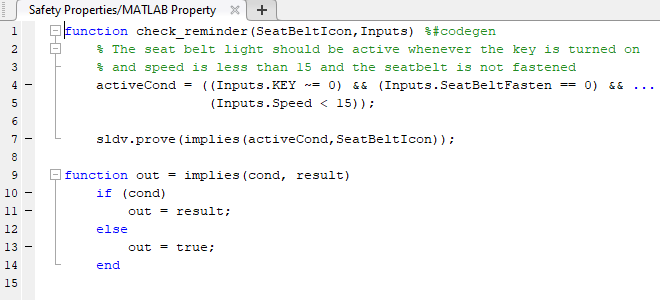
At the end of the check_reminder function definition,
add sldv.assume(Inputs.KEY==0 | 1); so that the last two
lines of the function definition are:
sldv.prove(implies(activeCond, SeatBeltIcon)); sldv.assume(Inputs.KEY==0 | 1);
Save the model and return to the top model.
To prove the safety properties, in the Simulink® Editor, select the Safety Properties
subsystem. On the Design Verifier tab, click
Prove Properties.
Alternatively, in the Simulink Editor, you can right-click the Safety
Properties subsystem and select Design Verifier > Prove Subsystem Properties.
Input Arguments
Alternatives
Instead of using the sldv.prove function, you can insert a Proof Objective block in your model. To learn about the differences between
Proof Objective blocks and sldv.prove, see Prove Model Properties.
You can also specify a proof objective by using MATLAB for code generation without using the sldv.prove
function. Using sldv.prove instead of directly using MATLAB for code generation eliminates the need to:
Express the objective by using a Simulink block.
Explicitly connect the proof output to a Simulink block.
Version History
Introduced in R2009b