monovslam
Visual simultaneous localization and mapping (vSLAM) and visual-inertial sensor fusion with monocular camera
Since R2023b
Description
Use the monovslam object to perform visual simultaneous
localization and mapping (vSLAM) and visual inertial SLAM (viSLAM) with a monocular camera.
The object extracts Oriented FAST and Rotated BRIEF (ORB) features from incrementally read
images, and then tracks those features to estimate camera poses, identify key frames, and
reconstruct a 3-D environment. The vSLAM algorithm also searches for loop closures using the
bag-of-features algorithm, and then optimizes the camera poses using pose graph optimization.
You can enhance the accuracy and robustness of the SLAM by integrating this object with IMU
data to perform visual-inertial sensor fusion. To learn more about visual SLAM, see Implement Visual SLAM in MATLAB.
Note
The monovslam object requires Navigation Toolbox™.
Creation
Syntax
Description
vslam = monovslam(intrinsics)vslam, by using the camera
intrinsic parameters.
The monovslam object does not account for lens distortion. You can
use the specified undistortImage function to undistort images
before adding them to the object.
The object represents 3-D map points and camera poses in world coordinates. The object
assumes the camera pose of the first key frame is an identity rigidtform3d
transform.
Note
The monovslam object runs on multiple threads internally, which can delay the processing of an image frame added by using the addFrame function. Additionally, the object running on multiple threads means the current frame the object is processing can be different than the recently added frame.
vslam = monovslam(intrinsics,imuParameters)vslam, by fusing the camera
input intrinsics with inertial measurement unit (IMU) readings.
vslam = monovslam(intrinsics,PropertyName=Value)MaxNumFeatures=850 sets the maximum number of ORB feature points to
extract from each image to 850.
Input Arguments
Properties
Object Functions
addFrame | Add image frame to visual SLAM object |
hasNewKeyFrame | Check if new key frame added in visual SLAM object |
checkStatus | Check status of visual SLAM object |
isDone | End-of-processing status for visual SLAM object |
mapPoints | Build 3-D map of world points |
poses | Absolute camera poses of key frames |
plot | Plot 3-D map points and estimated camera trajectory in visual SLAM |
reset | Reset visual SLAM object |
Examples
Perform monocular visual simultaneous localization and mapping (vSLAM) using the data from the TUM RGB-D Benchmark. You can download the data to a temporary directory using a web browser or by running this code:
baseDownloadURL = "https://cvg.cit.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir,"tum_rgbd_dataset",filesep); options = weboptions(Timeout=Inf); tgzFileName = dataFolder+"fr3_office.tgz"; folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder) disp("Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.") websave(tgzFileName,baseDownloadURL,options); % Extract contents of the downloaded file disp("Extracting fr3_office.tgz (1.38 GB) ...") untar(tgzFileName,dataFolder); end
Create an imageDatastore object to store all the RGB images.
imageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/rgb/";
imds = imageDatastore(imageFolder);Specify your camera intrinsic parameters, and use them to create a monocular visual SLAM object.
intrinsics = cameraIntrinsics([535.4 539.2],[320.1 247.6],[480 640]); vslam = monovslam(intrinsics,SkipMaxFrames=15);
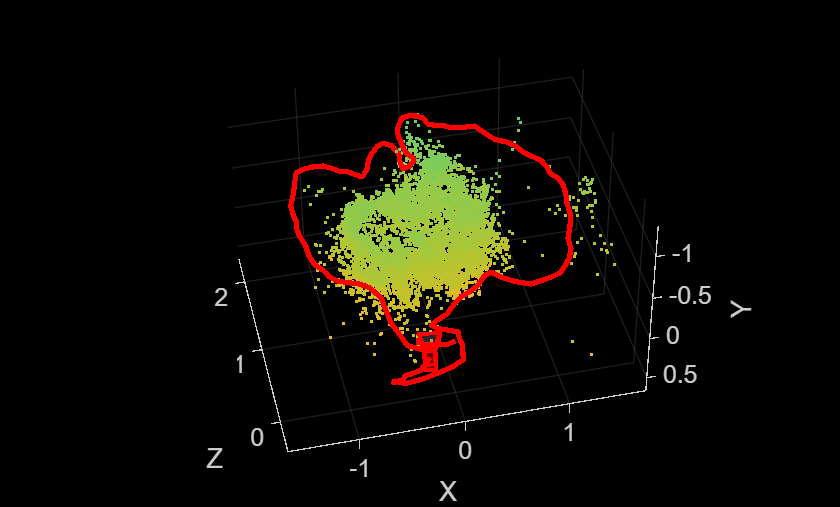
Process each image frame, and visualize the camera poses and 3-D map points. Note that the monovslam object runs several algorithm parts on separate threads, which can introduce a latency in processing of an image frame added by using the addFrame function.
for i = 1:numel(imds.Files) addFrame(vslam,readimage(imds,i)) if hasNewKeyFrame(vslam) % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); end
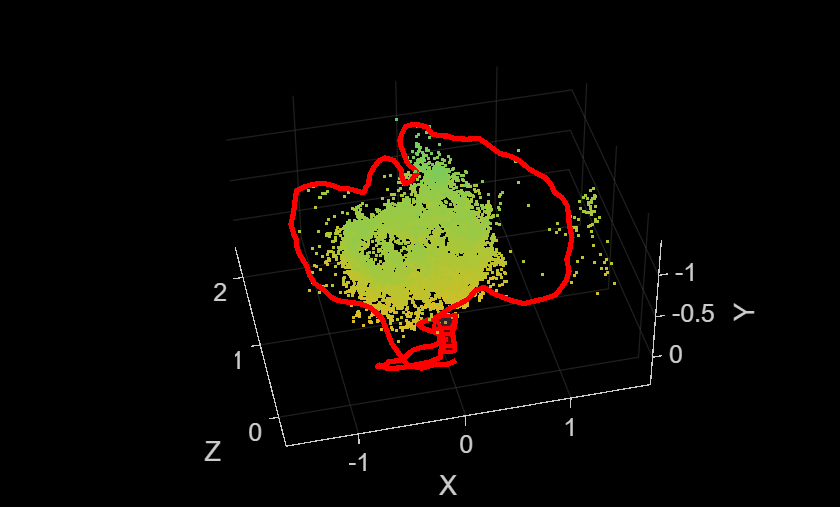
Plot intermediate results and wait until all images are processed.
while ~isDone(vslam) if hasNewKeyFrame(vslam) plot(vslam); end end
After all the images are processed, you can collect the final 3-D map points and camera poses for further analysis.
xyzPoints = mapPoints(vslam);
[camPoses,addedFramesIdx] = poses(vslam);
% Reset the system
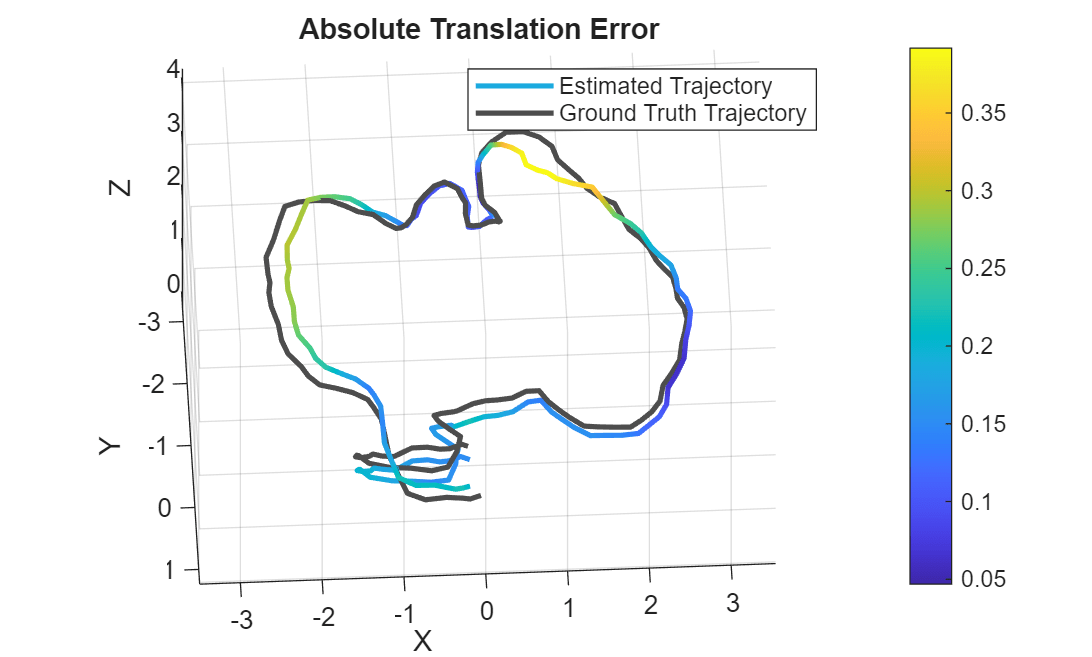
reset(vslam)Compare the estimated camera trajectory with the ground truth to evaluate the accuracy.
% Load ground truth gTruthData = load("orbslamGroundTruth.mat"); gTruth = gTruthData.gTruth; % Evaluate tracking accuracy mtrics = compareTrajectories(camPoses, gTruth(addedFramesIdx), AlignmentType="similarity"); disp(['Absolute RMSE for key frame location (m): ', num2str(mtrics.AbsoluteRMSE(2))]);
Absolute RMSE for key frame location (m): 0.043641
% Plot the absolute translation error at each key frame figure ax = plot(mtrics, "absolute-translation"); view(ax, [2.70 -49.20]);
Perform monocular visual-inertial SLAM using the data from the Blackbird data set (NYC Subway Winter). Download the MAT file which contains the images, camera intrinsics and IMU measurements.
uavDataTarFile = matlab.internal.examples.downloadSupportFile('shared_nav_vision/data','BlackbirdVIOData.tar'); % Extract the file. outputFolder = fileparts(uavDataTarFile); if (~exist(fullfile(outputFolder,"BlackbirdVIOData"),"dir")) untar(uavDataTarFile,outputFolder); end uavData = load(fullfile(outputFolder,"BlackbirdVIOData","data.mat")); images = uavData.images; timeStamps = uavData.timeStamps;
Set up the IMU noise parameters, camera intrinsics and the camera-IMU extrinsics transform.
imuParams = factorIMUParameters(SampleRate=100,GyroscopeNoise=0.1, ... GyroscopeBiasNoise=3e-3,AccelerometerNoise=0.3, ... AccelerometerBiasNoise=1e-3,ReferenceFrame="ENU"); intrinsics = uavData.intrinsics; camera2IMU = rigidtform3d(tform(uavData.camToIMUTransform));
Set up the monocular visual-inertial SLAM object.
vslam = monovslam(intrinsics,imuParams,MaxNumPoints=2000,SkipMaxFrames=2,TrackFeatureRange=[20,100], ... CameraToIMUTransform=camera2IMU,NumPosesThreshold=40,AlignmentFraction=0.9, ... CustomBagOfFeatures=bagOfFeaturesDBoW('BlackBirdBoW.bin.gz'),LoopClosureThreshold=100);
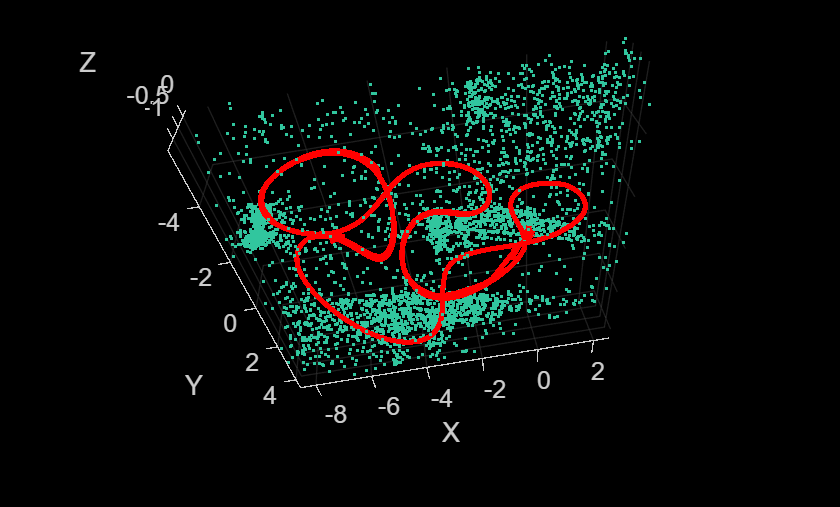
Process all the images frames and IMU measurements available, and visualize the camera poses and 3-D map points. The sequence does not contain any movement before the 150th frame.
startFrameIdx = 150; for i = startFrameIdx:length(images) if(i>startFrameIdx) imuMesurements = helperExtractIMUMeasurements(uavData, i-1, i); else imuMesurements.gyro=[]; imuMesurements.accel=[]; end addFrame(vslam, images{i}, imuMesurements.gyro, imuMesurements.accel); if hasNewKeyFrame(vslam) plot(vslam); end end
Note that the monovslam object runs several algorithm parts on separate threads, which can introduce a latency in processing of an image frame added by using the addFrame function.
% Plot intermediate results and wait until all images are processed while ~isDone(vslam) if hasNewKeyFrame(vslam) plot(vslam); end end
The helper function below is used to extract the IMU measurements, based on the camera timestamps.
function imuMesurements = helperExtractIMUMeasurements(data, startFrameIdx, currFrameIdx) timeStamps = data.timeStamps; startTimeStamp = timeStamps.imageTimeStamps(startFrameIdx); currTimeStamp = timeStamps.imageTimeStamps(currFrameIdx); [~,startIMUIdx] = min(abs(timeStamps.imuTimeStamps - startTimeStamp)); [~,currIMUIdx] = min(abs(timeStamps.imuTimeStamps - currTimeStamp)); imuMesurements.accel = data.accelReadings(startIMUIdx:(currIMUIdx-1),:); imuMesurements.gyro = data.gyroReadings(startIMUIdx:(currIMUIdx-1),:); end
References
[1] Mur-Artal, Raul, J. M. M. Montiel, and Juan D. Tardos. “ORB-SLAM: A Versatile and Accurate Monocular SLAM System.” IEEE Transactions on Robotics 31, no. 5 (October 2015): 1147–63. https://doi.org/10.1109/TRO.2015.2463671.
[2] Galvez-López, D., and J. D. Tardos. “Bags of Binary Words for Fast Place Recognition in Image Sequences.” IEEE Transactions on Robotics, vol. 28, no. 5, Oct. 2012, pp. 1188–97. DOI.org (Crossref), https://doi.org/10.1109/TRO.2012.2197158.
Extended Capabilities
Version History
Introduced in R2023bSee Also
Objects
stereovslam|rgbdvslam|factorIMUParameters(Navigation Toolbox) |cameraIntrinsics|imageDatastore|ORBPoints