camheading
Set or get heading angle of camera for Satellite Scenario Viewer
Description
outHeading = camheading(viewer,___)heading, then the function sets the output equal to the input
heading.
Examples
Create a satellite scenario object.
sc = satelliteScenario;
Add a ground station to the scenario.
latitude = 42.3001; % degrees longitude = -71.3504; % degrees groundStation(sc,latitude+0.05,longitude);
Launch the Satellite Scenario Viewer.
v = satelliteScenarioViewer(sc);

In the Satellite Scenario Viewer, set the height of the camera to 50 meters.
height = 50; % meters
campos(v,latitude,longitude,height);
pause(2);Set the pitch angle of the camera to 0 degrees.
pitch = 0; campitch(v,pitch); pause(2);
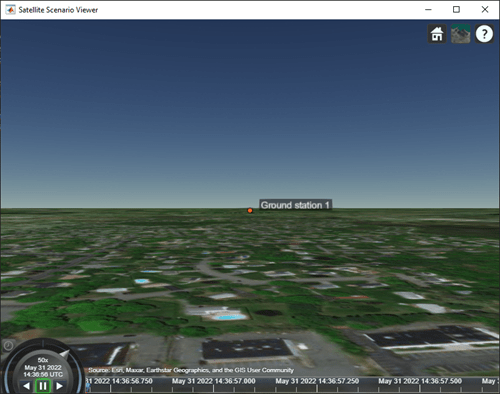
Set the heading angle of the camera to 20 degrees.
heading = 20; % degrees
camheading(v,heading);
Input Arguments
Output Arguments
Tips
When the pitch angle is near –90 (the default value) or 90 degrees, the camera loses one rotational degree of freedom. As a result, when you change the roll angle, the heading angle might change instead. This phenomenon is called gimbal lock. To avoid the effects of gimbal lock, call the
camheadingfunction instead of thecamrollfunction.
Version History
Introduced in R2021a
See Also
Objects
Functions
1 Alignment of boundaries and region labels are a presentation of the feature provided by the data vendors and do not imply endorsement by MathWorks®.