LTI System
Utilizzare l'oggetto del modello del sistema a tempo lineare invariante in Simulink

Librerie:
Control System Toolbox
Descrizione
Il blocco LTI System importa gli oggetti del modello del sistema lineare nell'ambiente di Simulink®. Specificare il modello LTI da importare nel parametro LTI system variable. È possibile importare qualsiasi tipo di modello di sistema dinamico a tempo lineare invariante. Se il sistema importato è un modello stato-spazio (ss), è possibile specificare i valori iniziali dello stato nel parametro Initial states.
Esempi
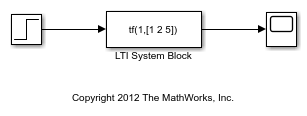
Il modello LTISystemBlockSimulation mostra come utilizzare un blocco LTI System per simulare la risposta di una funzione di trasferimento SISO a un input a gradino.
Per specificare un modello per il blocco LTI System, impostare il parametro del blocco LTI system variable su una delle seguenti opzioni:
Il nome della variabile di un modello LTI nel workspace di MATLAB® o nel workspace del modello, ad esempio
sys.Un'espressione di MATLAB che restituisce un modello LTI, ad esempio
tf(1,[1 1]).
Ad esempio, è possibile specificare un modello stato-spazio (ss), a guadagno a polo zero (zpk) o della funzione di trasferimento (tf). È possibile simulare modelli SISO o MIMO, nonché modelli a tempo continuo o a tempo discreto.
Nel modello LTISystemBlockSimulation, il parametro LTI system variable (Variabile del sistema LTI) è un'espressione di MATLAB, tf(1,[1 2 5]), che crea una funzione di trasferimento SISO a tempo continuo. Se il sistema specificato è un modello stato-spazio (ss), è possibile specificare i valori degli stati iniziali impostando il parametro Initial states (Stati iniziali).
Simulare il modello ed esaminare il risultato nello scope.
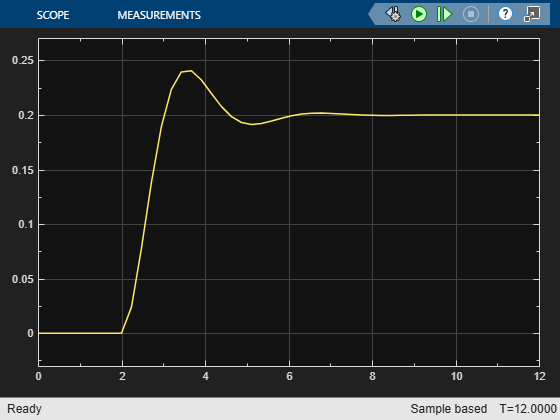
Questo esempio simula la risposta del sistema a un input al gradino a t = 2 s. Utilizzare il blocco LTI System per importare un oggetto del modello LTI in qualsiasi punto del modello di Simulink, al fine di simulare la risposta del sistema lineare a qualsiasi input.
Questo modello mostra come utilizzare un blocco LTI System per rappresentare un sistema lineare MIMO in Simulink®.
Il blocco LTI System ha un input e un output, anche quando si specifica un modello MIMO per il blocco. In tal caso, l'input e l'output del blocco diventano segnali vettoriali. Ad esempio, il modello LTISystemBlockMIMO utilizza un blocco LTI system per rappresentare un impianto MIMO in un sistema di controllo.
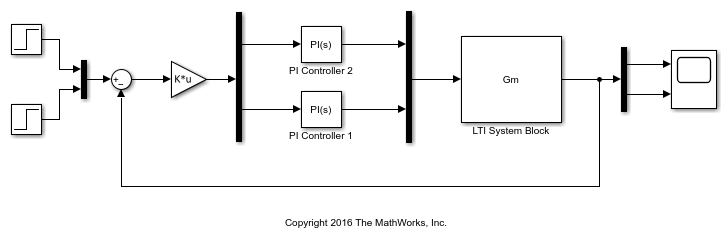
In questo modello, il sistema LTI specificato nel blocco è Gm, un modello della funzione di trasferimento a 2 output e 2 input memorizzato nel workspace del modello. Un blocco Mux combina i due output del controller in un segnale vettoriale per l'input del blocco LTI System. In modo analogo, un blocco Demux separa l'output vettoriale del blocco LTI System in due segnali scalari.
Simulare il modello ed esaminare il risultato nello scope.
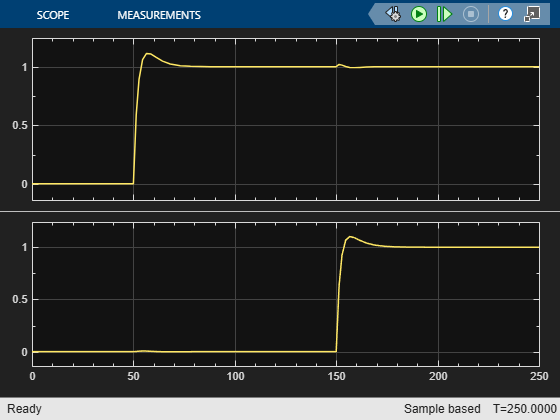
Questo esempio simula la risposta di un sistema a loop chiuso a un gradino a t = 50 s al primo input e un gradino a t = 150 s al secondo input. È possibile utilizzare il blocco LTI system ovunque si desideri inserire un sistema LTI in un modello di Simulink.