ss
Modello stato-spazio
Descrizione
Utilizzare ss per creare modelli stato-spazio a valore reale o a valore complesso oppure per convertire modelli di sistemi dinamici nella forma di modello stato-spazio.
Un modello stato-spazio è una rappresentazione matematica di un sistema fisico come un insieme di variabili di input, di output e di stato correlate da equazioni differenziali del primo ordine. Le variabili di stato definiscono i valori delle variabili di output. L'oggetto del modello ss può rappresentare modelli stato-spazio SISO o MIMO a tempo continuo o a tempo discreto.
A tempo continuo, un modello stato-spazio si presenta nella forma seguente:
In questo caso, x, u e y rappresentano rispettivamente gli stati, gli input e gli output, mentre A, B, C e D sono le matrici stato-spazio. A tempo discreto, un modello stato-spazio assume la forma:
L'oggetto ss rappresenta un modello stato-spazio a tempo continuo o a tempo discreto in MATLAB® memorizzando A, B, C e D insieme ad altre informazioni, come il tempo di campionamento, i nomi di I/O, i ritardi e gli offset.
È possibile creare un oggetto del modello stato-spazio specificando direttamente le matrici di stato, di input e di output oppure convertendo un modello di altro tipo (come un modello di funzione di trasferimento tf) nella forma di stato-spazio. Per ulteriori informazioni, vedere Modelli stato-spazio. È possibile utilizzare un oggetto del modello ss per:
Eseguire l'analisi lineare
Rappresentare un modello lineare a tempo invariante (LTI) per eseguire la progettazione di controllo
Eseguire un abbinamento con altri modelli LTI per rappresentare un sistema più complesso
Creazione
Sintassi
Descrizione
sys = ss(A,B,C,D)
Ad esempio, si consideri un impianto con Nx stati, Ny output e Nu input. Le matrici stato-spazio sono:
Aè una matriceNxxNxa valore reale o a valore complesso.Bè una matriceNxxNua valore reale o a valore complesso.Cè una matriceNyxNxa valore reale o a valore complesso.Dè una matriceNyxNua valore reale o a valore complesso.
sys = ss(___,PropertyName=Value)
sys = ss(ltiSys,component)ss il componente misurato, il componente di rumore o entrambi i componenti di un component specificato di un modello lineare a tempo invariante (LTI) ltiSys. Utilizzare questa sintassi solo quando ltiSys è un modello identificato (LTI), come un oggetto idtf (System Identification Toolbox), idss (System Identification Toolbox), idproc (System Identification Toolbox), idpoly (System Identification Toolbox) o idgrey (System Identification Toolbox).
sys = ss(ssSys,'minimal')minreal(ss(sys)), dove la matrice A ha la dimensione più piccola possibile.
La conversione nella forma stato-spazio non è definita in modo univoco nel caso SISO. Inoltre, non è garantito che produca una realizzazione minima nel caso MIMO. Per ulteriori informazioni, vedere Recommended Working Representation.
sys = ss(ssSys,'explicit')ssSys. ss restituisce un errore se ssSys non è adeguato. Per ulteriori informazioni sulla realizzazione esplicita dello stato-spazio, vedere Modelli stato-spazio.
Argomenti di input
Argomenti di output
Proprietà
Funzioni oggetto
I seguenti elenchi contengono un sottoinsieme rappresentativo delle funzioni utilizzabili con gli oggetti del modello ss. In linea generale, qualsiasi funzione applicabile a Modelli di sistemi dinamici è applicabile a un oggetto ss.
Esempi
Creare il modello stato-spazio SISO definito dalle seguenti matrici stato-spazio:
Specificare le matrici A, B, C e D e creare il modello stato-spazio.
A = [-1.5,-2;1,0]; B = [0.5;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2
x1 -1.5 -2
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
Creare un modello stato-spazio con un tempo di campionamento di 0,25 secondi e le seguenti matrici stato-spazio:
Specificare le matrici stato-spazio.
A = [0 1;-5 -2]; B = [0;3]; C = [0 1]; D = 0;
Specificare il tempo di campionamento.
Ts = 0.25;
Creare il modello stato-spazio.
sys = ss(A,B,C,D,Ts);
Per questo esempio, si consideri un cubo che ruota attorno al suo vertice con tensore d'inerzia J e una forza di smorzamento F di grandezza 0,2. L'input del sistema è la coppia motrice, mentre le velocità angolari sono gli output. Le matrici stato-spazio per il cubo sono:
Specificare le matrici A, B, C e D e creare il modello stato-spazio a tempo continuo.
J = [8 -3 -3; -3 8 -3; -3 -3 8]; F = 0.2*eye(3); A = -J\F; B = inv(J); C = eye(3); D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2 x3
x1 -0.04545 -0.02727 -0.02727
x2 -0.02727 -0.04545 -0.02727
x3 -0.02727 -0.02727 -0.04545
B =
u1 u2 u3
x1 0.2273 0.1364 0.1364
x2 0.1364 0.2273 0.1364
x3 0.1364 0.1364 0.2273
C =
x1 x2 x3
y1 1 0 0
y2 0 1 0
y3 0 0 1
D =
u1 u2 u3
y1 0 0 0
y2 0 0 0
y3 0 0 0
Continuous-time state-space model.
Model Properties
sys è un sistema MIMO poiché contiene 3 input e 3 output osservati dalle matrici C e D. Per ulteriori informazioni sui modelli stato-spazio MIMO, vedere MIMO State-Space Models.
Creare un modello stato-spazio utilizzando le seguenti matrici di stato a tempo discreto, a più input e più output, con tempo di campionamento ts = 0.2 secondi:
Specificare le matrici stato-spazio e creare il modello stato-spazio MIMO a tempo discreto.
A = [-7,0;0,-10]; B = [5,0;0,2]; C = [1,-4;-4,0.5]; D = [0,-2;2,0]; ts = 0.2; sys = ss(A,B,C,D,ts)
sys =
A =
x1 x2
x1 -7 0
x2 0 -10
B =
u1 u2
x1 5 0
x2 0 2
C =
x1 x2
y1 1 -4
y2 -4 0.5
D =
u1 u2
y1 0 -2
y2 2 0
Sample time: 0.2 seconds
Discrete-time state-space model.
Model Properties
Creare matrici stato-spazio e specificare il tempo di campionamento.
A = [-0.2516 -0.1684;2.784 0.3549]; B = [0;3]; C = [0 1]; D = 0; Ts = 0.05;
Creare il modello stato-spazio, specificando i nomi di stato e di input utilizzando le coppie nome-valore.
sys = ss(A,B,C,D,Ts,'StateName',{'Position' 'Velocity'},... 'InputName','Force');
Il numero dei nomi di stato e di input deve essere coerente con le dimensioni di A, B, C e D.
Assegnare un nome agli input e agli output può risultare utile quando si tratta di grafici di risposta per i sistemi MIMO.
step(sys)
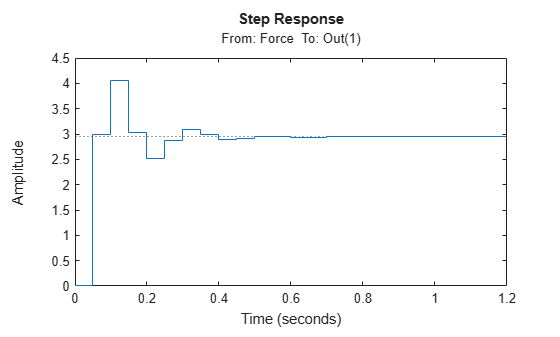
Si noti il nome dell'input Force nel titolo del grafico di risposta al gradino.
Per questo esempio, creare un modello stato-spazio con le stesse proprietà di unità di tempo e di input ereditate da un altro modello stato-spazio. Si considerino i seguenti modelli stato-spazio:
Per prima cosa, creare un modello stato-spazio sys1 con le proprietà TimeUnit e InputUnit impostate su 'minutes'.
A1 = [-1.5,-2;1,0]; B1 = [0.5;0]; C1 = [0,1]; D1 = 5; sys1 = ss(A1,B1,C1,D1,'TimeUnit','minutes','InputUnit','minutes');
Verificare che le proprietà dell'unità di tempo e di input di sys1 siano impostate su 'minutes'.
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Creare il secondo modello stato-spazio con le proprietà ereditate da sys1.
A2 = [7,-1;0,2]; B2 = [0.85;2]; C2 = [10,14]; D2 = 2; sys2 = ss(A2,B2,C2,D2,sys1);
Verificare che le unità di tempo e di input di sys2 siano state ereditate da sys1.
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
In questo esempio, si crea un modello stato-spazio MIMO a guadagno statico.
Si consideri la seguente matrice di guadagno statico a due input e due output:
Specificare la matrice di guadagno e creare il modello stato-spazio a guadagno statico.
D = [2,4;3,5]; sys1 = ss(D)
sys1 =
D =
u1 u2
y1 2 4
y2 3 5
Static gain.
Model Properties
Calcolare il modello stato-spazio della seguente funzione di trasferimento:
Creare il modello di funzione di trasferimento.
H = [tf([1 1],[1 3 3 2]) ; tf([1 0 3],[1 1 1])];
Convertire questo modello in un modello stato-spazio.
sys = ss(H);
Esaminare la grandezza del modello stato-spazio.
size(sys)
State-space model with 2 outputs, 1 inputs, and 5 states.
Il numero di stati è pari all'ordine cumulativo delle voci SISO in H(s).
Per ottenere una realizzazione minima di H(s), immettere
sys = ss(H,'minimal');
size(sys)State-space model with 2 outputs, 1 inputs, and 3 states.
Il modello risultante è un modello del terzo ordine, che è il numero minimo di stati necessario per rappresentare H(s). Per vedere questo numero di stati, fattorizzare nuovamente H(s) come il prodotto di un sistema del primo ordine e di un sistema del secondo ordine.
Per questo esempio, estrarre i componenti misurati e di rumore di un modello polinomiale identificato in due modelli stato-spazio separati.
Caricare il modello polinomiale Box-Jenkins ltiSys in identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys è un modello a tempo discreto identificato di forma: , dove rappresenta il componente misurato e rappresenta il componente di rumore.
Estrarre i componenti misurati e di rumore come modelli stato-spazio.
sysMeas = ss(ltiSys,'measured') sysMeas =
A =
x1 x2
x1 1.575 -0.6115
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 -0.2851 0.3916
D =
u1
y1 0
Input delays (sampling periods): 2
Sample time: 0.04 seconds
Discrete-time state-space model.
Model Properties
sysNoise = ss(ltiSys,'noise')sysNoise =
A =
x1 x2 x3
x1 1.026 -0.26 0.3899
x2 1 0 0
x3 0 0.5 0
B =
v@y1
x1 0.25
x2 0
x3 0
C =
x1 x2 x3
y1 0.319 -0.04738 0.07106
D =
v@y1
y1 0.04556
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time state-space model.
Model Properties
Il componente misurato può servire come modello dell'impianto, mentre il componente di rumore può essere utilizzato come modello di disturbo per la progettazione del sistema di controllo.
Creare un modello stato-spazio con descrittore (E ≠ I).
a = [2 -4; 4 2]; b = [-1; 0.5]; c = [-0.5, -2]; d = [-1]; e = [1 0; -3 0.5]; sysd = dss(a,b,c,d,e);
Calcolare una realizzazione esplicita del sistema (E = I).
syse = ss(sysd,'explicit')syse =
A =
x1 x2
x1 2 -4
x2 20 -20
B =
u1
x1 -1
x2 -5
C =
x1 x2
y1 -0.5 -2
D =
u1
y1 -1
Continuous-time state-space model.
Model Properties
Confermare che il descrittore e le realizzazioni esplicite presentano dinamiche equivalenti.
bodeplot(sysd,syse,'g--')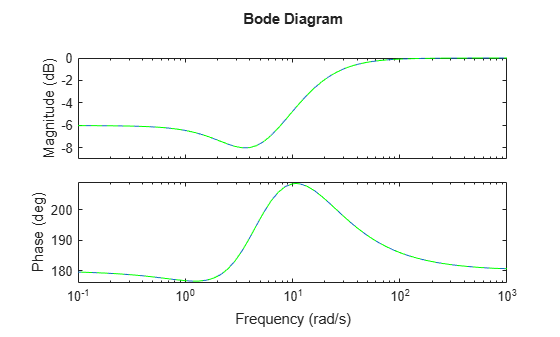
Questo esempio mostra come creare un modello stato-spazio genss con parametri fissi e sincronizzabili.
dove a e b sono parametri sincronizzabili, i cui valori iniziali sono rispettivamente -1 e 3.
Creare i parametri sincronizzabili utilizzando realp.
a = realp('a',-1); b = realp('b',3);
Definire una matrice generalizzata utilizzando le espressioni algebriche di a e b.
A = [1 a+b;0 a*b];
A è una matrice generalizzata la cui proprietà Blocks contiene a e b. Il valore iniziale di A è [1 2;0 -3], dai valori iniziali di a e b.
Creare le matrici stato-spazio a valore fisso.
B = [-3.0;1.5]; C = [0.3 0]; D = 0;
Utilizzare ss per creare il modello stato-spazio.
sys = ss(A,B,C,D)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 2 states, and the following blocks: a: Scalar parameter, 2 occurrences. b: Scalar parameter, 2 occurrences. Model Properties Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
sys è un modello LTI generalizzato (genss) con parametri a e b sincronizzabili.
Per questo esempio, si consideri un modello stato-spazio SISO definito dalle seguenti matrici stato-spazio:
Considerando un ritardo di input di 0,5 secondi e un ritardo di output di 2,5 secondi, creare un oggetto del modello stato-spazio per rappresentare le matrici A, B, C e D.
A = [-1.5,-2;1,0]; B = [0.5;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D,'InputDelay',0.5,'OutputDelay',2.5)
sys =
A =
x1 x2
x1 -1.5 -2
x2 1 0
B =
u1
x1 0.5
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Input delays (seconds): 0.5
Output delays (seconds): 2.5
Continuous-time state-space model.
Model Properties
È inoltre possibile utilizzare il comando get per visualizzare tutte le proprietà di un oggetto MATLAB.
get(sys)
A: [2×2 double]
B: [2×1 double]
C: [0 1]
D: 0
E: []
Offsets: []
Scaled: 0
StateName: {2×1 cell}
StatePath: {2×1 cell}
StateUnit: {2×1 cell}
InternalDelay: [0×1 double]
InputDelay: 0.5000
OutputDelay: 2.5000
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: ''
Ts: 0
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
Per ulteriori informazioni sulla specifica del ritardo temporale per un modello LTI, vedere Specifying Time Delays.
Per questo esempio, si consideri un System object™ stato-spazio che rappresenti le seguenti matrici di stato:
Creare un oggetto stato-spazio sys utilizzando il comando ss.
A = [-1.2,-1.6,0;1,0,0;0,1,0]; B = [1;0;0]; C = [0,0.5,1.3]; D = 0; sys = ss(A,B,C,D);
Quindi, calcolare il modello stato-spazio a loop chiuso per un guadagno negativo unitario e trovare i poli del System object stato-spazio a loop chiuso sysFeedback.
sysFeedback = feedback(sys,1); P = pole(sysFeedback)
P = 3×1 complex
-0.2305 + 1.3062i
-0.2305 - 1.3062i
-0.7389 + 0.0000i
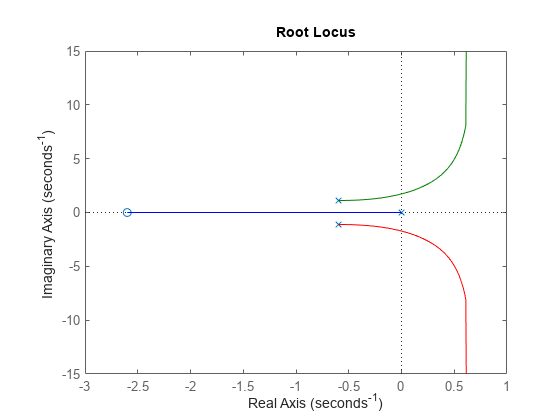
Il loop di feedback per il guadagno unitario è stabile poiché tutti i poli presentano parti reali negative. Il controllo dei poli a loop chiuso fornisce una valutazione binaria della stabilità. In pratica, è più utile sapere quanto la stabilità sia robusta (o fragile). Un'indicazione della robustezza è la misura in cui il guadagno del loop può variare prima che si perda la stabilità. È possibile utilizzare il grafico del luogo della radice per stimare l'intervallo di valori k per i quali il loop è stabile.
rlocus(sys)
Le variazioni del guadagno del loop sono solo un aspetto della stabilità robusta. In generale, una modellazione imperfetta dell'impianto indica che sia il guadagno che la fase non sono noti con esattezza. Poiché l'effetto degli errori di modellazione è più dannoso in prossimità della frequenza di crossover del guadagno (frequenza alla quale il guadagno a loop aperto è pari a 0 dB), un altro elemento importante è la variazione di fase che può essere tollerata a questa frequenza.
È possibile visualizzare i margini di guadagno e di fase in un grafico di Bode come segue.
bode(sys)
grid
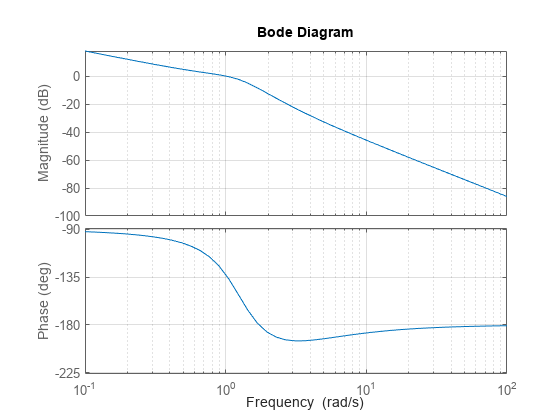
Per un esempio più dettagliato, vedere Valutazione dei margini di guadagno e di fase.
Per questo esempio, progettare un controller PID 2-DOF con una larghezza di banda target di 0,75 rad/s per un sistema rappresentato dalle seguenti matrici:
Creare un oggetto stato-spazio sys utilizzando il comando ss.
A = [-0.5,-0.1;1,0]; B = [1;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D)
sys =
A =
x1 x2
x1 -0.5 -0.1
x2 1 0
B =
u1
x1 1
x2 0
C =
x1 x2
y1 0 1
D =
u1
y1 0
Continuous-time state-space model.
Model Properties
Utilizzando la larghezza di banda target, utilizzare pidtune per generare un controller 2-DOF.
wc = 0.75;
C2 = pidtune(sys,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 0.513, Ki = 0.0975, Kd = 0.577, b = 0.344, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
L'utilizzo del tipo 'PID2', determina la generazione di un controller 2-DOF da parte di pidtune, rappresentato come un oggetto pid2. La visualizzazione conferma questo risultato. La visualizzazione mostra inoltre che pidtune sincronizza tutti i coefficienti del controller, inclusi i pesi dei setpoint b e c per bilanciare prestazioni e robustezza.
Per sincronizzare il PID in modo interattivo nel Live Editor, vedere l'attività Tune PID Controller Live Editor. Questa attività consente di progettare un controller PID in modo interattivo e genera automaticamente il codice MATLAB per lo script live.
Per sincronizzare il PID in modo interattivo in un'applicazione autonoma, utilizzare PID Tuner. Per un esempio di progettazione di un controller utilizzando l'app, vedere Progettazione di un controller PID per un tracking di riferimento veloce.
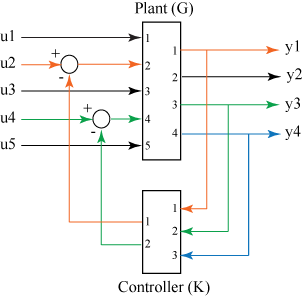
Si consideri un impianto stato-spazio G con cinque input e quattro output e un controller stato-spazio di feedback K con tre input e due output. Gli output 1, 3 e 4 dell'impianto G devono essere connessi agli input del controller K e gli output del controller agli input 4 e 2 dell'impianto.
Per questo esempio, si considerino due modelli stato-spazio a tempo continuo sia per G che per K, rappresentati dal seguente insieme di matrici:
AG = [-3,0.4,0.3;-0.5,-2.8,-0.8;0.2,0.8,-3]; BG = [0.4,0,0.3,0.2,0;-0.2,-1,0.1,-0.9,-0.5;0.6,0.9,0.5,0.2,0]; CG = [0,-0.1,-1;0,-0.2,1.6;-0.7,1.5,1.2;-1.4,-0.2,0]; DG = [0,0,0,0,-1;0,0.4,-0.7,0,0.9;0,0.3,0,0,0;0.2,0,0,0,0]; sysG = ss(AG,BG,CG,DG)
sysG =
A =
x1 x2 x3
x1 -3 0.4 0.3
x2 -0.5 -2.8 -0.8
x3 0.2 0.8 -3
B =
u1 u2 u3 u4 u5
x1 0.4 0 0.3 0.2 0
x2 -0.2 -1 0.1 -0.9 -0.5
x3 0.6 0.9 0.5 0.2 0
C =
x1 x2 x3
y1 0 -0.1 -1
y2 0 -0.2 1.6
y3 -0.7 1.5 1.2
y4 -1.4 -0.2 0
D =
u1 u2 u3 u4 u5
y1 0 0 0 0 -1
y2 0 0.4 -0.7 0 0.9
y3 0 0.3 0 0 0
y4 0.2 0 0 0 0
Continuous-time state-space model.
Model Properties
AK = [-0.2,2.1,0.7;-2.2,-0.1,-2.2;-0.4,2.3,-0.2]; BK = [-0.1,-2.1,-0.3;-0.1,0,0.6;1,0,0.8]; CK = [-1,0,0;-0.4,-0.2,0.3]; DK = [0,0,0;0,0,-1.2]; sysK = ss(AK,BK,CK,DK)
sysK =
A =
x1 x2 x3
x1 -0.2 2.1 0.7
x2 -2.2 -0.1 -2.2
x3 -0.4 2.3 -0.2
B =
u1 u2 u3
x1 -0.1 -2.1 -0.3
x2 -0.1 0 0.6
x3 1 0 0.8
C =
x1 x2 x3
y1 -1 0 0
y2 -0.4 -0.2 0.3
D =
u1 u2 u3
y1 0 0 0
y2 0 0 -1.2
Continuous-time state-space model.
Model Properties
Definire i vettori feedout e feedin sulla base degli input e degli output da connettere in un loop di feedback.
feedin = [4 2]; feedout = [1 3 4]; sys = feedback(sysG,sysK,feedin,feedout,-1)
sys =
A =
x1 x2 x3 x4 x5 x6
x1 -3 0.4 0.3 0.2 0 0
x2 1.18 -2.56 -0.8 -1.3 -0.2 0.3
x3 -1.312 0.584 -3 0.56 0.18 -0.27
x4 2.948 -2.929 -2.42 -0.452 1.974 0.889
x5 -0.84 -0.11 0.1 -2.2 -0.1 -2.2
x6 -1.12 -0.26 -1 -0.4 2.3 -0.2
B =
u1 u2 u3 u4 u5
x1 0.4 0 0.3 0.2 0
x2 -0.44 -1 0.1 -0.9 -0.5
x3 0.816 0.9 0.5 0.2 0
x4 -0.2112 -0.63 0 0 0.1
x5 0.12 0 0 0 0.1
x6 0.16 0 0 0 -1
C =
x1 x2 x3 x4 x5 x6
y1 0 -0.1 -1 0 0 0
y2 -0.672 -0.296 1.6 0.16 0.08 -0.12
y3 -1.204 1.428 1.2 0.12 0.06 -0.09
y4 -1.4 -0.2 0 0 0 0
D =
u1 u2 u3 u4 u5
y1 0 0 0 0 -1
y2 0.096 0.4 -0.7 0 0.9
y3 0.072 0.3 0 0 0
y4 0.2 0 0 0 0
Continuous-time state-space model.
Model Properties
size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys è il modello stato-spazio a loop chiuso risultante, ottenuto connettendo gli input e gli output specificati di G e K.
Da R2024a
Questo esempio mostra come linearizzare un modello Simulink® e memorizzare gli offset della linearizzazione nella proprietà Offsets dell'oggetto del modello ss.
Aprire il modello Simulink.
mdl = 'watertankNLModel';
open_system(mdl)Specificare la condizione iniziale per l'altezza dell'acqua.
h0 = 10;
Specificare i punti di analisi lineare del modello.
io(1) = linio('watertankNLModel/Step',1,'input'); io(2) = linio('watertankNLModel/H',1,'output');
Simulare il modello ed estrarre i punti operativi in corrispondenza di istanti specifici di tempo.
tlin = [0 15 30]; op = findop(mdl,tlin);
Calcolare il risultato della linearizzazione con gli offset.
options = linearizeOptions('StoreOffsets',true);
[linsys,~,info] = linearize(mdl,io,op,options);La funzione restituisce un array di modelli stato-spazio linsys e i corrispondenti offset di linearizzazione in info.Offsets.
La proprietà Offsets dell'oggetto del modello ss richiede una struttura con i campi u, y, x e dx. Per impostare direttamente questi offset, è possibile utilizzare l'output info.Offsets da linearize.
linsys.Offsets = info.Offsets; linsys.Offsets
ans=3×1 struct array with fields:
dx
x
u
y