move
Move Ryze drone in all three axes
Description
Add-On Required: This feature requires the MATLAB Support Package for Ryze Tello Drones add-on.
move(
moves the Ryze Tello drone by a relative distance in x,y and z axes specified by
droneObj,relativeCoordinate)relativeCoordinate.
move(
moves the Ryze Tello drone by a relative distance in x, y, and z axes with additional option
specified as droneObj,relativeCoordinate,Name,Value)Name,Value pair argument.
The following schematic shows the quadcopter axis characteristics:
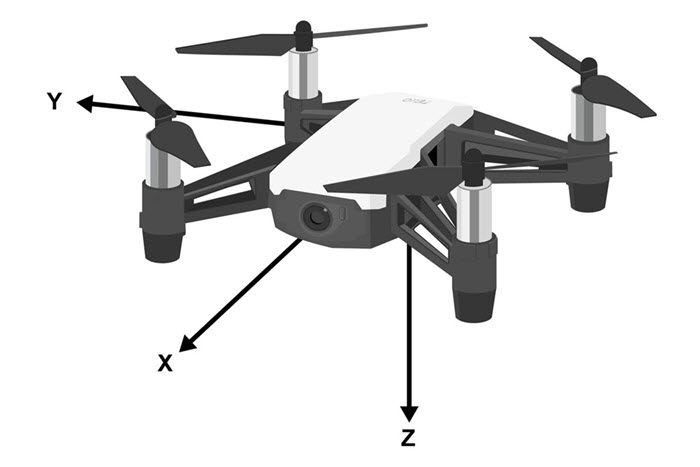
The quadcopter body axis is centered in the center of gravity.
The x-axis starts at the center of gravity and points in the direction along the nose of the quadcopter.
The y-axis starts at the center of gravity and points to the right of the quadcopter.
The z-axis starts at the center of gravity and points downward from the quadcopter, following the right-hand rule.
Examples
Input Arguments
Name-Value Arguments
Version History
Introduced in R2020a