Navigation Toolbox
Navigation Toolbox™ fornisce algoritmi e strumenti di analisi per la modellazione e la calibrazione dei sensori, la pianificazione del movimento, la localizzazione e la mappatura simultanee (SLAM) e la navigazione inerziale. La toolbox fornisce modelli di sensori e algoritmi per la localizzazione. È possibile simulare e visualizzare i dati dei sensori IMU, GPS e dell'encoder delle ruote, nonché regolare i filtri di fusione per la stima della posa multisensore.
La toolbox include pianificatori di percorsi basati su ricerca e campionamento personalizzabili, nonché metriche per la convalida e il confronto dei percorsi. È possibile creare rappresentazioni di mappe 2D e 3D, generare mappe utilizzando algoritmi SLAM e visualizzare e correggere in modo interattivo la generazione di mappe con l'applicazione SLAM Map Builder.
Vengono forniti esempi di riferimento per applicazioni aeronautiche, di guida automatizzata, di robotica e di elettronica di consumo. Puoi testare i tuoi algoritmi di navigazione distribuendoli direttamente sull'hardware (con MATLAB® Coder™ o Simulink® Coder).
Inizia con Navigation Toolbox
Impara le nozioni di base di Navigation Toolbox
Trasformazioni di coordinate e traiettorie
Quaternioni, matrici di rotazione, trasformazioni, generazione di traiettorie
Modelli di sensori
Simulazione e calibrazione per IMU, GPS e sensori di portata
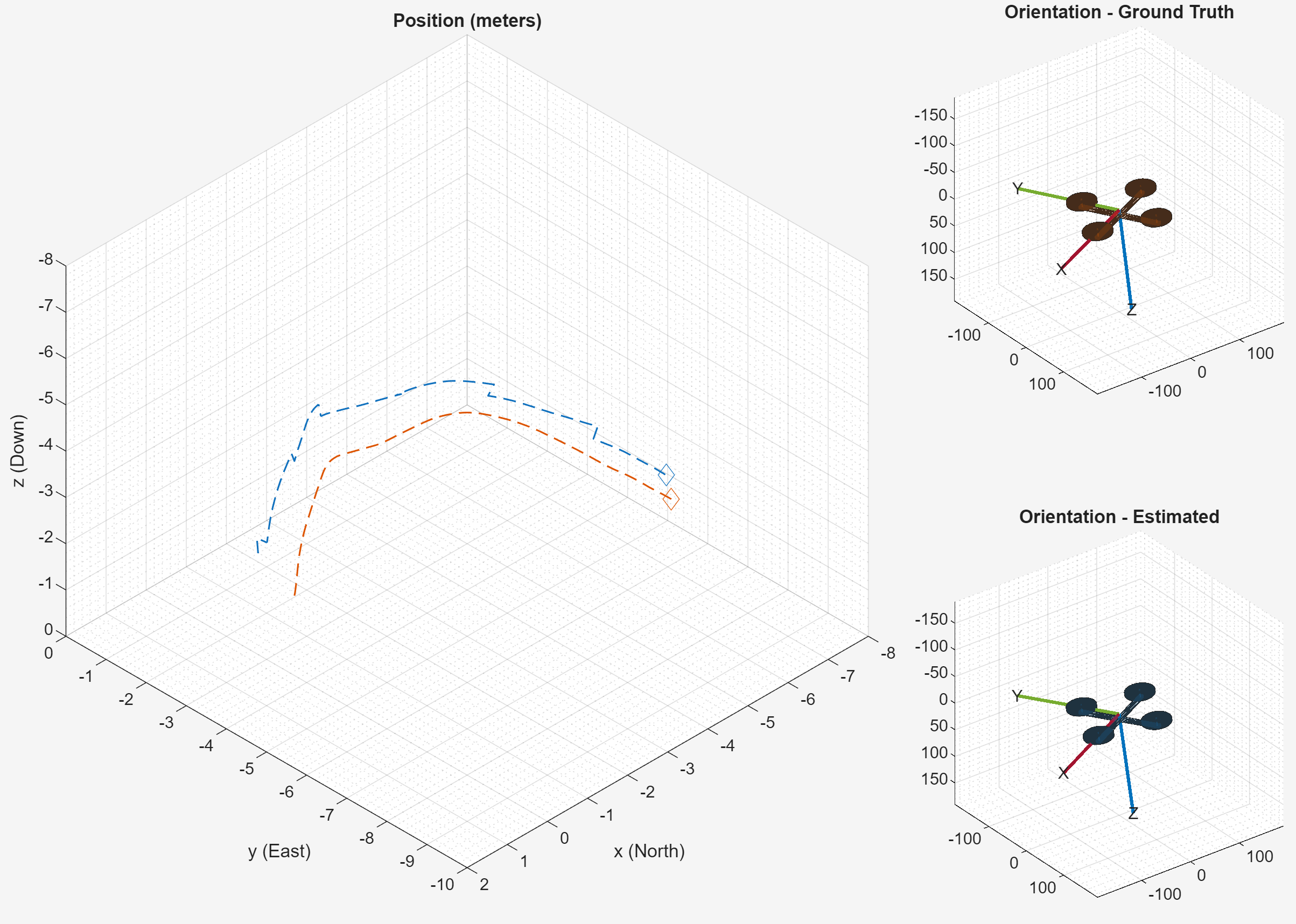
Fusione di sensori inerziali
Navigazione inerziale con IMU e GPS, fusione dei sensori, regolazione personalizzata dei filtri
Posizionamento GNSS
Stima della posizione utilizzando i dati GNSS
Algoritmi di localizzazione
Filtri di particelle, corrispondenza di scansione, localizzazione Monte Carlo, grafici di posa, odometria
Mappatura
Mappe di occupazione 2D e 3D, mappe egocentriche, raycasting
SBATTERE
Localizzazione e mappatura simultanee 2D e 3D
Pianificazione del movimento
Pianificazione del percorso globale e locale, monitoraggio del percorso, evitamento degli ostacoli, metriche del percorso
Generazione e distribuzione del codice
Generare codice C/C++ e funzioni MEX per l'accelerazione degli algoritmi