global2frenet
Convert global states to Frenet states
Syntax
Description
frenetState = global2frenet(refPath,globalState)
[___,
returns latTimeDerivatives] = global2frenet(refPath,globalState)latTimeDerivatives containing first and second-order
derivatives of lateral deviation with respect to time and a flag indicating if the heading
should flip when converting to global coordinates.
[___] = global2frenet(
accepts a vector of arc lengths, refPath,globalState,sFrame)sFrame at which the Frenet frame
should be centered at.
Examples
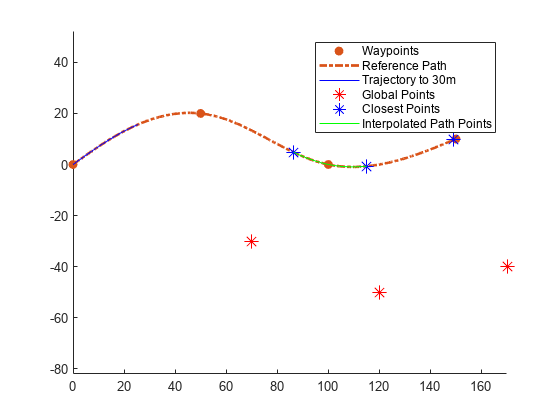
Generate a reference path from a set of waypoints.
waypoints = [0 0; 50 20; 100 0; 150 10]; refPath = referencePathFrenet(waypoints);
Create a trajectoryGeneratorFrenet object from the reference path.
connector = trajectoryGeneratorFrenet(refPath);
Generate a five-second trajectory between the path origin and a point 30 meters down the path as Frenet states.
initCartState = refPath.SegmentParameters(1,:); initFrenetState = global2frenet(refPath,initCartState); termFrenetState = initFrenetState + [30 zeros(1,5)]; frenetTraj = connect(connector,initFrenetState,termFrenetState,5);
Convert the trajectory to the global states.
globalTraj = frenet2global(refPath,frenetTraj.Trajectory);
Display the reference path and the trajectory.
show(refPath); axis equal hold on plot(globalTraj(:,1),globalTraj(:,2),'b')
Specify global points and find the closest points on reference path.
globalPoints = waypoints(2:end,:) + [20 -50]; nearestPathPoint = closestPoint(refPath,globalPoints);
Display the global points and the closest points on reference path.
plot(globalPoints(:,1),globalPoints(:,2),'r*','MarkerSize',10) plot(nearestPathPoint(:,1),nearestPathPoint(:,2),'b*','MarkerSize',10)
Interpolate between the arc lengths of the first two closest points along the reference path.
arclengths = linspace(nearestPathPoint(1,6),nearestPathPoint(2,6),10); pathStates = interpolate(refPath,arclengths);
Display the interpolated path points.
plot(pathStates(:,1),pathStates(:,2),'g') legend(["Waypoints","Reference Path","Trajectory to 30m",... "Global Points","Closest Points","Interpolated Path Points"])
Input Arguments
Output Arguments
More About
The
global2frenetobject function finds a point[x y]palong the path that is closest to the xy-coordinate of the global state[x y theta kappa speed accel]g. Since the reference path is C1 continuous (tangentially continuous), the distance will be shortest, where[x y]g-[x y]pis orthogonal to the tangent of the path.where:
x y and theta –– SE(2) state expressed in global coordinates, with x and y in meters and theta in radians.
kappa –– Curvature, or inverse of the radius, in
m-1.speed –– Speed in the theta direction in
m/s.accel –– Acceleration in the theta direction in
m/s2.
The function then evaluates the full state of the path
[x y theta kappa dkappa s]p. This is equivalent to a moving reference frame located at[x y]pwhose longitudinal axis points alongthetapand lateral axis intersects with[x y]g(right-hand rule). The instantaneous motion of this frame is described by[kappa dkappa]p.where:
x y and theta — SE(2) state expressed in global coordinates, with x and y in meters and theta in radians.
kappa — Curvature, or inverse of the radius, in
m-1.dkappa — Derivative of curvature with respect to arc length in
m-2.s — Arc length, or distance along path from path origin, in meters.

The velocity and acceleration components of the global state act along the tangent defined by
thetag, which itself evolves based onkappag. The function then maps the global position, velocity, and acceleration to the local Frenet frame and returns the Frenet state,[s ds dds L dL ddL]f.where:
s — Arc length, or distance along path from path origin, in meters.
L — Perpendicular deviation from the direction of the reference path, in meters.
ds and dds — Derivatives of s relative to time.
dL and ddL — Derivatives of L relative to the arc length, s.

The process for the
frenet2globalfunction is the inverse of theglobal2frenetfunction.The
frenet2globalfunction evaluates the path at the arc length of the Frenet state,sf=sp, returning[x y theta kappa dkappa s]p.This point once again defines a reference frame whose axes and motion can be used to project the lateral or longitudinal deviations and their first and second-order derivatives back into the global frame.
Extended Capabilities
Version History
Introduced in R2020b