Modelli di sensori
Eseguire la modellazione e la simulazione di sensori per accelerometri, magnetometri, giroscopi, altimetri, GPS, IMU e sensori di distanza. Analizza le letture dei sensori, il rumore dei sensori, le condizioni ambientali e altri parametri di configurazione. Generare traiettorie per emulare questi sensori mentre si viaggia attraverso il mondo e calibrare le prestazioni dei propri sensori.
Per fondere più sensori o utilizzare altri algoritmi di localizzazione, vedere .
Per maggiori informazioni sulla localizzazione e il posizionamento GNSS, vedere Posizionamento GNSS.
Funzioni
Blocchi
Argomenti
- Introduction to Simulating IMU Measurements
This example shows how to simulate inertial measurement unit (IMU) measurements using the
imuSensorSystem object™. - Generate IMU Readings on a Double Pendulum
This example shows how to generate inertial measurement unit (IMU) readings from two IMU sensors mounted on the links of a double pendulum.
- Model IMU, GPS, and INS/GPS
Model combinations of inertial sensors and GPS
- Inertial Sensor Noise Analysis Using Allan Variance
This example shows how to use the Allan variance to determine noise parameters of a MEMS gyroscope.
- Wheel Encoder Error Sources
Explore the various error sources of wheel encoders and how they affect the wheel odometry estimate.
- Rimuovere la distorsione dalla misurazione della velocità angolare
Questo esempio mostra come rimuovere la polarizzazione del giroscopio da una IMU utilizzando
imufilter. - Configure Time Scope MATLAB Object
Customize
timescopeproperties and use measurement tools. - Simulate Inertial Sensor Readings from a Driving Scenario
Generate synthetic sensor data from IMU, GPS, and wheel encoders using driving scenario generation tools from Automated Driving Toolbox™.
- Simulate INS Block
In this example, you simulate an INS block by using the pose information of a vehicle undertaking a left-turn trajectory.
Esempi in primo piano

Magnetometer Calibration
Magnetometers detect magnetic field strength along a sensor's X,Y and Z axes. Accurate magnetic field measurements are essential for sensor fusion and the determination of heading and orientation.

Generate Off-Centered IMU Readings
Generate inertial measurement unit (IMU) readings from a sensor that is mounted on a ground vehicle. Depending on the location of the sensor, the IMU accelerations are different.

Gesture Recognition Using Inertial Measurement Units
Recognize gestures based on a handheld inertial measurement unit (IMU). Gesture recognition is a subfield of the general Human Activity Recognition (HAR) field. In this example, you use quaternion dynamic time warping and clustering to build a template matching algorithm to classify five gestures.
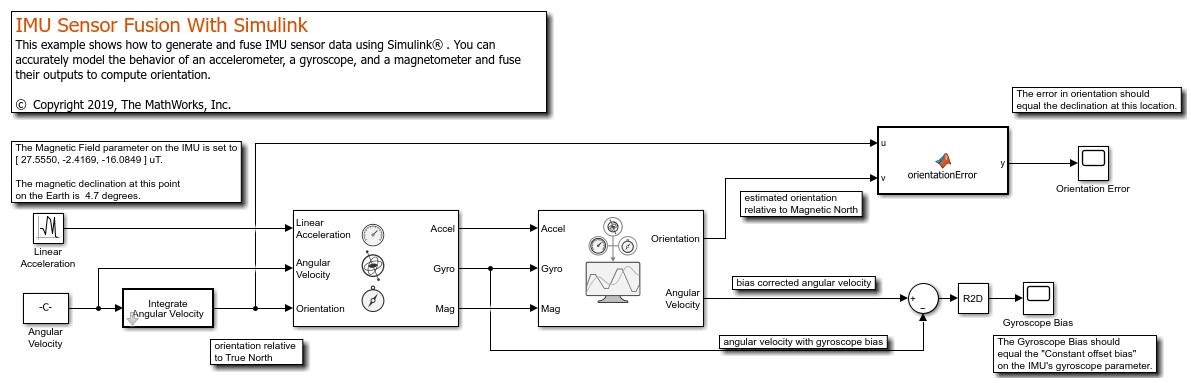
Fusione del sensore IMU con Simulink
Questo esempio mostra come generare e fondere i dati del sensore IMU utilizzando Simulink ®. È possibile modellare con precisione il comportamento di un accelerometro, di un giroscopio e di un magnetometro e fondere i loro output per calcolare l'orientamento.