Target dei processori multicore
La programmazione multicore, o modellazione per l’esecuzione simultanea, aiuta a creare sistemi concomitanti da distribuire su processori multicore e sistemi multiprocessore. Esempi di tali sistemi sono i sistemi di elaborazione del segnale e di controllo degli impianti. Le tecniche di partizione e mappatura di Simulink® aiutano a superare le sfide più comuni nella progettazione di sistemi per l'esecuzione simultanea.
La figura mostra un esempio di sistema con più funzioni progettato per essere eseguito su un sistema multiprocessore basato su CPU e FPGA. Il sistema è suddiviso in più componenti che vengono mappati sull’unità di pianificazione della CPU o sull'FPGA.
Per scoprire i fondamenti della programmazione multicore, vedere Concepts in Multicore Programming. Per informazioni su come progettare sistemi per l'esecuzione simultanea in Simulink, vedere Multicore Programming with Simulink.

Funzioni
Simulink.architecture.config | Create or convert configuration for concurrent execution |
Simulink.architecture.add | Add tasks or triggers to selected architecture of model |
Simulink.architecture.delete | Delete triggers and tasks from selected architecture of model |
Simulink.architecture.find_system | Find objects under architecture object |
Simulink.architecture.get_param | Get configuration parameters of architecture objects |
Simulink.architecture.importAndSelect | Import and select target architecture for concurrent execution environment for model |
Simulink.architecture.profile | Generate profile report for model configured for concurrent execution |
Simulink.architecture.register | Add custom target architecture to concurrent execution target architecture selector |
Simulink.architecture.set_param | Set architecture object properties |
Oggetti
Simulink.GlobalDataTransfer | Configure concurrent execution data transfers |
Strumenti
| Concurrent Execution Tool | Specify tasks, triggers, and nodes for concurrent execution of Simulink model |
Argomenti
Comprensione della programmazione multicore in Simulink
- Concepts in Multicore Programming
Theory relevant to modeling for concurrent execution. - Multicore Programming with Simulink
Modeling for concurrent execution using Simulink. - Implicit and Explicit Partitioning of Models
Learn about the key differences between implicit and explicit partitioning. - Supported Targets for Multicore Programming
Deploy concurrent execution models to supported multicore targets. - Limitations with Multicore Programming in Simulink
Limitations and considerations when partitioning a model for concurrent execution.
Configurazione del modello
- Configure Your Model for Concurrent Execution
Learn how to configure your Simulink model to take advantage of concurrent execution. - Specify a Target Architecture
Choose or define a target architecture for a model configured for concurrent execution. - Partition Your Model Using Explicit Partitioning
Add tasks, create partitions, and map individual tasks to partitions using explicit partitioning. - Configure Data Transfer Settings Between Concurrent Tasks
Specify options for handling data transfers between concurrently executing partitions.
Implementazione del parallelismo in Simulink
- Implement Data Parallelism in Simulink
This example shows how to implement data parallelism for a system in a Simulink model. - Implement Task Parallelism in Simulink
This example shows how to implement task parallelism for a system represented in a Simulink® model. - Implement Pipelining in Simulink
This example shows how to implement pipelining for a system represented in a Simulink® model.
Generazione di codice
- Optimize and Deploy on a Multicore Target
Configure a model for concurrent execution using explicit partitioning and deploy it to a target. - Assign Tasks to Cores for Multicore Programming
This example shows how to take advantage of executing code on a multicore processor by graphical partitioning.
Informazioni complementari
Esempi in primo piano

Assign Tasks to Cores for Multicore Programming
Take advantage of executing code on a multicore processor by graphical partitioning. This example requires Simulink® Coder™ software to generate multithreaded code.

Implement an FFT on a Multicore Processor and an FPGA
Take advantage of a multicore processor target with FPGA acceleration by graphically partitioning a model. This example requires Simulink® Coder™ to generate multi-threaded code and HDL Coder™ to generate HDL code. You cannot generate HDL code on Macintosh systems.

Multicore Programming of a Field-Oriented Control on Zynq
Demonstrates how to implement a control algorithm that contains multiple rates on Zynq®. To take advantage of both the cores and the FPGA hardware, the example uses a graphical partitioning approach such that code from different partitions is distributed across the cores and the hardware.

Multicore Deployment of a Plant Model
Illustrates how to take advantage of executing multithreaded code on a multicore processor using graphical partitioning. This example requires Simulink® Coder™ to generate multithreaded code.

Modeling Objects with Identical Dynamics Using For Each Subsystem
Model multiple objects with identical dynamics using the For Each subsystem. The number of objects is parameterized by the length of the input signal.

Vectorizing a Scalar Algorithm with a For-Each Subsystem
Use the for-each subsystem. In this example, the operations are performed on a vector for simplicity.
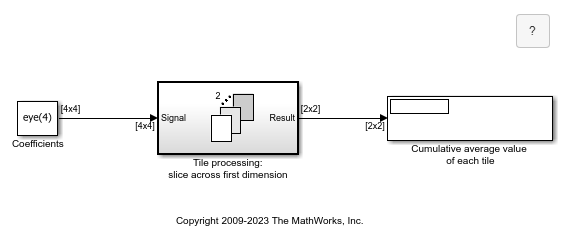
Tiled Processing of 2-D Signals with For-Each Subsystem
Use a for-each subsystem. In this example, the operations are performed on matrices.
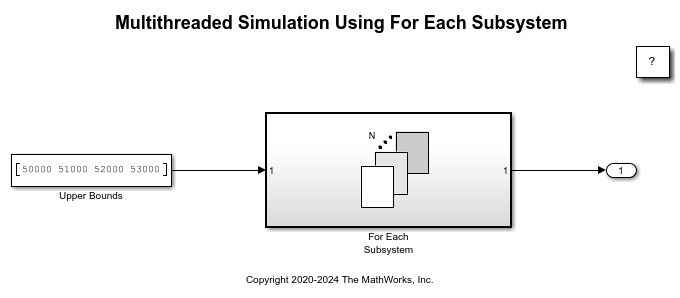
Multithreaded Simulation Using For Each Subsystem
Speed up execution of a model on multiple cores using a For Each Subsystem in Rapid Accelerator simulation.