Proceedings
Featured Presentations
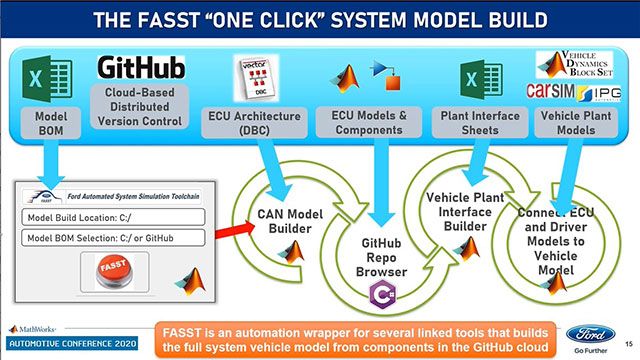

Model-Based Agility with Ford Automated System Simulation Toolchain (FASST)
Nate Rolfes, Ford
Raghu Baskaran, Ford
Steven Foster, Ford
Nick Adams, Ford
Robert ter Waarbeek, Ford
Raghu Baskaran, Ford
Steven Foster, Ford
Nick Adams, Ford
Robert ter Waarbeek, Ford

Virtual Vehicle


Model-Based Agility with Ford Automated System Simulation Toolchain (FASST)
Nate Rolfes, Ford
Raghu Baskaran, Ford
Steven Foster, Ford
Nick Adams, Ford
Robert ter Waarbeek, Ford
Raghu Baskaran, Ford
Steven Foster, Ford
Nick Adams, Ford
Robert ter Waarbeek, Ford


Simulink for Virtual Vehicle Development
Chris Fillyaw, MathWorks
Mike Sasena, MathWorks
Mike Sasena, MathWorks
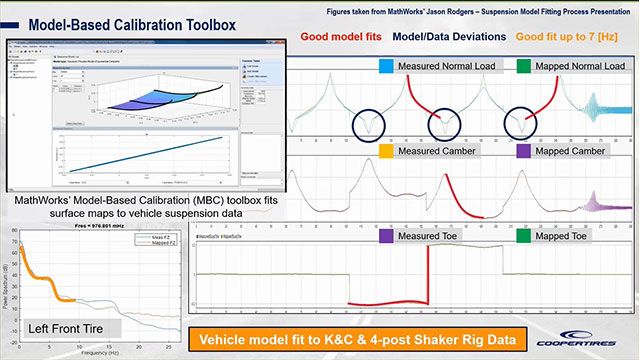

Using Model-Based Design for Vehicle Dynamics Simulation
Bennett Norley, Cooper Tire & Rubber Company
Sid Attravanam, Cooper Tire & Rubber Company
Sid Attravanam, Cooper Tire & Rubber Company
Automated Driving







Seleziona un sito web
Seleziona un sito web per visualizzare contenuto tradotto dove disponibile e vedere eventi e offerte locali. In base alla tua area geografica, ti consigliamo di selezionare: United States.
Puoi anche selezionare un sito web dal seguente elenco:
Americhe
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)