Proceedings
Featured Presentations


Plenary Session: Software Transformation





Martin Römpert, Continental Automotive

Amir Sardari, Bosch
Gernot Schraberger, MathWorks
Gernot Schraberger, MathWorks

Electrification and Virtual Engineering

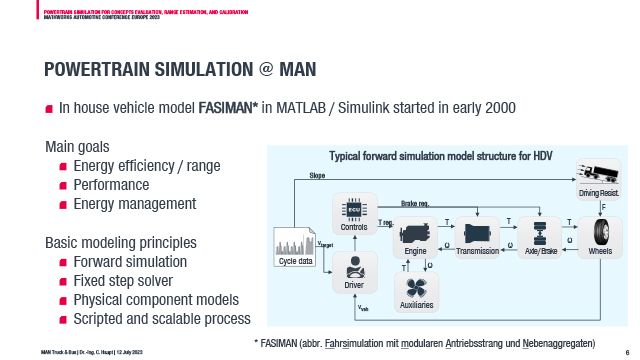
Dr. Christian Haupt, MAN Truck & Bus

Mohammad Abu-Alqumsan, MathWorks
Marc Segelken, MathWorks
Marc Segelken, MathWorks



Automated Driving and ADAS


Simone Hämmerle, MathWorks
Advait Valluri, MathWorks
Advait Valluri, MathWorks


Nicole Bonfatti, MathWorks
Martin Büchel, MathWorks
Martin Büchel, MathWorks


Darshana Unnikrishnan, KPIT Technologies
Nandakumar Kaiprath, KPIT Technologies
Nandakumar Kaiprath, KPIT Technologies

Christoph Stockhammer, MathWorks
Puoi anche selezionare un sito web dal seguente elenco:
Americhe
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia-Pacifico
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)