Constant
Constant value
Libraries:
Simulink /
Commonly Used Blocks
Simulink /
Sources
DSP System Toolbox /
Sources
HDL Coder /
Commonly Used Blocks
HDL Coder /
Sources
Alternative Configurations of Constant Block:
Eulers Number | Inf | NaN | Negative Inf | One | ...
Description
The Constant block generates a real or complex constant value signal. Use this block to provide a constant signal input. The block generates scalar, vector, or matrix output, depending on:
The dimensionality of the Constant value parameter
The setting of the Interpret vector parameters as 1-D parameter
The output of the block has the same dimensions and elements as the Constant value parameter. If you specify for this parameter a vector that you want the block to interpret as a vector, select the Interpret vector parameters as 1-D check box. Otherwise, if you specify a vector for the Constant value parameter, the block treats that vector as a matrix.
Tip
To output a constant enumerated value, consider using the Enumerated Constant (Simulink) block instead. The Constant block provides block parameters that do not apply to enumerated types, such as Output minimum and Output maximum.
Using Bus Objects as the Output Data Type
The Constant block supports nonvirtual buses as the output data type. Using
a bus object as the output data type can help simplify your model. If you use a bus
object as the output data type, set the Constant value to
0 or to a MATLAB® structure that matches the bus object.
Using Structures for the Constant Value of a Bus
The structure you specify must contain a value for every element of the bus represented by the bus object. The block output is a nonvirtual bus signal.
You can use the Simulink.Bus.createMATLABStruct (Simulink)
to create a full structure that corresponds to a bus.
You can use Simulink.Bus.createObject (Simulink) to
create a bus object from a MATLAB structure.
If the signal elements in the output bus use numeric data types other than
double, you can specify the structure fields by using typed
expressions such as uint16(37) or untyped expressions such as
37. To control the field data types, you can use the bus
object as the data type of a Simulink.Parameter
object. To decide whether to use typed or untyped expressions, see Control Data Types of Initial Condition Structure Fields (Simulink).
Setting Configuration Parameters to Support Using a Bus Object Data Type
To enable the use of a bus object as an output data type, before you start a simulation,
set Configuration Parameters > Diagnostics > Data Validity > Advanced parameters > Underspecified initialization detection to Simplified. For more information, see
Underspecified initialization detection (Simulink).
Examples
Open and simulate the model named SimpleGain.
mdl = "SimpleGain";
open_system(mdl)
sim(mdl);
This model represents the equation:
The Constant block provides a constant value of 2 to the Gain block.
The Gain block multiplies its input by 5.
The Display block displays the result of the multiplication.
Extended Examples

Create Nonvirtual Bus from MATLAB Structure
You can use a Constant block to compactly represent a nonvirtual bus with constant-valued elements.
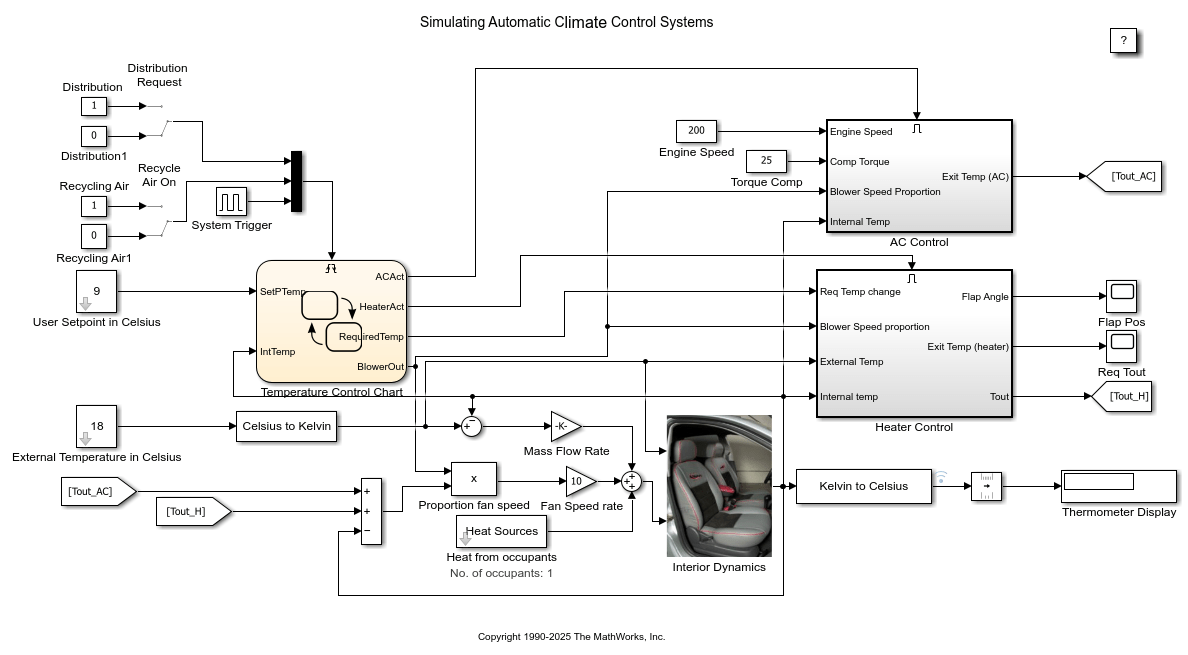
Simulating Automatic Climate Control Systems
Simulate an automatic climate control system in a car using Simulink® and Stateflow®.

Bang-Bang Control Using Temporal Logic
Use Stateflow® to model a bang-bang temperature control system for a boiler. The boiler dynamics are modeled in Simulink®.

Simulation of Bouncing Ball
Uses two models of a bouncing ball to show different approaches to modeling hybrid dynamic systems with Zeno behavior. Zeno behavior is informally characterized by an infinite number of events occurring in a finite time interval for certain hybrid systems. As the ball loses energy, the ball collides with the ground in successively smaller intervals of time.
Ports
Output
Parameters
Main
Specify the constant value output of the block.
The default value depends on the block you add.
1— Constant or One block0— Zero blockinf— Inf block-inf— Negative Inf blockexp(1)— Eulers Number blockpi— Pi blockNaN— NaN block
You can enter any expression that MATLAB evaluates as a matrix, including the Boolean keywords
true and false.
If you set Output data type to a bus object, you can specify one of these options:
A full MATLAB structure corresponding to the bus object
0to indicate a structure corresponding to the ground value of the bus object
For details, see Using Bus Objects as the Output Data Type.
For nonbus data types, Simulink converts this parameter from its value data type to the specified output data type offline, using a rounding method of nearest and overflow action of saturate.
Dependencies
The software ignores the data type of the constant value when Output
data type specifies a Simulink.ValueType
object.
When this parameter specifies a Simulink.Parameter object and
Output data type specifies a
Simulink.ValueType object:
The block uses the minimum, maximum, and data type specified by the
Simulink.ValueTypeobject.The block uses the unit specified by the
Simulink.Parameterobject.The dimensions and complexity specified by the objects must match.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | Value |
| Values: | scalar in quotes | vector in quotes | matrix in quotes | array in quotes |
| Data Types: | char | string |
Select this check box to output a vector of length
N if the Constant
value parameter evaluates to an
N-element row or column vector.
When you select this check box, the block outputs a vector of length
N, provided the Constant value parameter evaluates to anN-element row or column vector.When you clear this check box, the block outputs a matrix of dimension 1-by-
NorN-by-1, provided the Constant value parameter evaluates to anN-element row or column vector. For example, the block outputs a matrix of dimension 1-by-NorN-by-1.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | VectorParams1D |
| Values: | 'on' (default) | 'off' |
Specify the interval between times that the Constant block output can change during simulation, for example, due to tuning the Constant value parameter.
The default value of inf indicates that the block output can never
change. This setting speeds simulation and generated code by avoiding
the need to recompute the block output. The code can potentially inline
the evaluated value at the time of code generation, as described in
Inline Numeric Values of Block Parameters (Simulink Coder).
See Specify Sample Time (Simulink) for more information.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | SampleTime |
| Values: | 'inf' (default) | scalar in quotes | vector in quotes |
| Data Types: | char | string |
Signal Attributes
Specify the lower value of the output range that the software checks as a finite, real, double, scalar value.
The software uses the minimum to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters (Simulink)) for some blocks.
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output minimum does not saturate or clip the actual output signal. Use the Saturation (Simulink) block instead.
Dependencies
The software ignores the value of this parameter when Output data
type specifies a Simulink.ValueType or
Simulink.Bus object. The software uses the minimum values
specified by the Simulink.ValueType object or the
Simulink.BusElement objects in the Simulink.Bus
object instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | OutMin |
| Values: | '[ ]' (default) | scalar in quotes |
Specify the upper value of the output range that the software checks as a finite, real, double, scalar value.
The software uses the maximum value to perform:
Parameter range checking (see Specify Minimum and Maximum Values for Block Parameters (Simulink)) for some blocks.
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Automatic scaling of fixed-point data types.
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes such as SIL or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Tips
Output maximum does not saturate or clip the actual output signal. Use the Saturation (Simulink) block instead.
Dependencies
The software ignores the value of this parameter when Output data
type specifies a Simulink.ValueType or
Simulink.Bus object. The software uses the maximum values
specified by the Simulink.ValueType object or the
Simulink.BusElement objects in the Simulink.Bus
object instead.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | OutMax |
| Values: | '[ ]' (default) | scalar in quotes |
Specify the output data type.
The Data Type Assistant helps you
set data attributes. To use the Data Type Assistant, click ![]() . For more information, see Specify Data Types Using Data Type Assistant (Simulink).
. For more information, see Specify Data Types Using Data Type Assistant (Simulink).
You can specify any of these options:
Inherited data type
Built-in Simulink data type — For example, specify
singleoruint8. See Data Types Supported by Simulink (Simulink).Fixed-point data type — Use the
fixdt(Simulink) function. For example, specifyfixdt(1,16,0).Enumerated data type — Use the name of the type preceded by
Enum:. For example, specifyEnum: myEnumType.Bus data type — Use the name of the
Simulink.Bus(Simulink) object preceded byBus:. For example, specifyBus: myBusObject.Value type (since R2023b) — Use the name of the
Simulink.ValueType(Simulink) object preceded byValueType:. For example, specifyValueType: windVelocity. The value type you specify must haveDimensionsModeset to'Fixed'.Custom data type — Use a MATLAB expression that specifies the type. For example, you can specify a
Simulink.NumericType(Simulink) object whoseDataTypeModeproperty is set to a value other than'Fixed-point: unspecified scaling'.
When you specify a
Simulink.ValueType or Simulink.Bus object as the
data type, the Output minimum and Output
maximum parameters of the Constant block are ignored.
The software uses the corresponding properties of the
Simulink.ValueType object or the
Simulink.BusElement objects in the Simulink.Bus
object instead. For example, suppose a block sets Output minimum
to 0. When the Output data type of the block
specifies a ValueType object that has 1 as its
minimum, the block uses 1 instead of 0 as its
minimum.
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | OutDataTypeStr |
| Values: | 'Inherit: Inherit from 'Constant
value'' (default) | 'Inherit: Inherit via back propagation' | 'double' | 'single' | 'half' | 'int8' | 'uint8' | 'int16' | 'uint16' | 'int32' | 'uint32' | 'int64' | 'uint64' | 'boolean' | 'fixdt(1,16)' | 'fixdt(1,16,0)' | 'fixdt(1,16,2^0,0)' | 'Enum: <class name>' | 'Bus: <object name>' | 'ValueType: <object name>' | '<data type expression>' |
Select this parameter to prevent the fixed-point tools from overriding the Output data type you specify on the block. For more information, see Use Lock Output Data Type Setting (Fixed-Point Designer).
Programmatic Use
To set the block parameter value programmatically, use
the set_param (Simulink) function.
| Parameter: | LockScale |
| Values: | 'off' (default) | 'on' |
Select the category of data to specify.
Inherit— Inheritance rules for data types. SelectingInheritenables a second menu to the right. Select one of these choices:Inherit from 'Constant value'(default)Inherit via back propagation
Built in— Built-in data types. SelectingBuilt inenables a second menu to the right. Select one of these choices:double(default)singlehalfint8uint8int16uint16int32uint32int64uint64boolean
Fixed point— Fixed-point data types.Enumerated— Enumerated data types. SelectingEnumeratedenables a text box to the right, where you can enter a class name.Bus object— Bus object. SelectingBus objectenables a text box to the right, where you enter the name of a bus object that you want to use to define the structure of the bus. To create or change a bus object, click Edit to the right of the text box.Value type(since R2023b) — Value type. SelectingValue typeenables a text box to the right, where you enter the name of a value type that you want to use to define the properties of the output signal. To create or change a value type, click Edit to the right of the text box.Expression— Expressions that evaluate to data types. SelectingExpressionenables a text box to the right, where you can enter the expression.Do not specify a bus object as the expression.
Select the data type override mode for this signal.
When you select
Inherit, the software inherits the data type override setting from its context, that is, from the block,Simulink.Signalobject, or Stateflow® chart that is using the signal.When you select
Off, the software ignores the data type override setting of its context and uses the fixed-point data type specified for the signal.
For more information, see Specify Data Types Using Data Type Assistant (Simulink).
Dependencies
To enable this parameter, click the Show data type
assistant button, and set the
Mode to Built in
or Fixed point.
Tips
The ability to turn off data type override for an individual data type provides greater control over the data types in your model when you apply data type override. For example, you can use this option to ensure that data types meet the requirements of downstream blocks regardless of the data type override setting.
Specify whether the fixed-point data is signed or unsigned. Signed data can represent positive and negative values, but unsigned data represents positive values only.
Signed, specifies the fixed-point data as signed.Unsigned, specifies the fixed-point data as unsigned.
For more information, see Specify Data Types Using Data Type Assistant (Simulink).
Dependencies
To enable this parameter, set the Mode to Fixed
point.
Specify the method for scaling your fixed-point data to avoid overflow conditions and minimize quantization errors. For more information, see Specifying a Fixed-Point Data Type (Simulink).
Dependencies
To enable this parameter, set Mode to
Fixed point.
Specify the bit size of the word that holds the quantized integer. For more information, see Specifying a Fixed-Point Data Type (Simulink).
Dependencies
To enable this parameter, set Mode to
Fixed point.
Specify fraction length for fixed-point data type as a positive or negative integer. For more information, see Specifying a Fixed-Point Data Type (Simulink).
Dependencies
To enable this parameter, set Scaling to
Binary point.
Specify slope for the fixed-point data type. For more information, see Specifying a Fixed-Point Data Type (Simulink).
Dependencies
To enable this parameter, set Scaling to
Slope and bias.
Specify bias for the fixed-point data type as any real number. For more information, see Specifying a Fixed-Point Data Type (Simulink).
Dependencies
To enable this parameter, set Scaling to
Slope and bias.
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Alternative Configurations
Extended Capabilities
Version History
Introduced before R2006aSee Also
Enumerated Constant (Simulink) | Simulink.Parameter (Simulink) | Simulink.BusElement (Simulink)
Topics
- Set Block Parameter Values (Simulink)
- Define Bus Properties for Reuse (Simulink)
- Specify Initial Conditions for Bus Elements (Simulink)
- Create Array of Buses from MATLAB Structures (Simulink)