FIR Decimation
Perform polyphase FIR decimation
Libraries:
DSP System Toolbox /
Filtering /
Multirate Filters
DSP System Toolbox HDL Support /
Filtering
Description
The FIR Decimation block performs an efficient polyphase decimation using an integer downsampling factor M along the first dimension.
Conceptually, the FIR decimator (as shown in the schematic) consists of an
anti-aliasing FIR filter followed by a downsampler. To design an FIR anti-aliasing
filter, use the designMultirateFIR function.
The FIR filter filters the data in each channel of the input using a direct-form FIR filter. The downsampler that follows downsamples each channel of filtered data by taking every M-th sample and discarding the M – 1 samples that follow. M is the value of the decimation factor that you specify. The resulting discrete-time signal has a sample rate that is 1/M times the original sample rate.

Note that the actual block algorithm implements a direct-form FIR polyphase structure, an efficient equivalent of the combined system depicted in the diagram. For more details, see Algorithms.
Under specific conditions, this block also supports SIMD code generation. For details, see Code Generation.
Examples

FIR Decimation Using Single-Rate Processing
Use FIR Decimation block in single-rate processing mode.

FIR Decimation Using Multirate Frame-Based Processing
Use FIR Decimation block in multirate frame-based processing mode.

Polyphase Implementation of FIR Decimation Block
Polyphase implementation of the FIR decimator.

Two-Stage Multirate Narrow Lowpass Filter
Implement a two-stage multirate narrow band lowpass filter using FIR Decimation and FIR Interpolation blocks.
Ports
Input
Output
Parameters
Coefficient source
Specify the FIR filter coefficient source as one of the following:
Dialog parameters — Specify the filter coefficients through the FIR filter coefficients parameter in the block dialog box.
Input port — Specify the filter coefficients through the Num input port.
Filter object — Specify the filter using a
dsp.FIRDecimatorSystem object™.Auto — When you select Auto, the block designs an FIR decimator using the decimation factor that you specify in Decimation factor. The
designMultirateFIRfunction designs the filter and returns the coefficients used by the block.For more information on the filter design, see Orfanidis [2].
Main Tab
Specify the lowpass FIR filter coefficients, in descending powers of
z, as a vector. By default,
designMultirateFIR(1,2) computes the filter
coefficients.
The transfer function H(z) of the FIR filter is given by:
You can generate the FIR filter coefficient vector, b =
[b0,
b1, …,
bN], using one of the
DSP System Toolbox filter design functions such as designMultirateFIR, firnyquist, firgr, or firceqrip.
To act as an effective anti-aliasing filter, the coefficients usually
correspond to a lowpass filter with a normalized cutoff frequency no greater
than 1/M, where M is the decimation factor. To
design such a filter, use the designMultirateFIR
function.
The block internally initializes all filter states to zero.
Dependencies
This parameter appears only when you set the Coefficient source to Dialog parameters.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Complex Number Support: Yes
Specify the integer factor M. The block decreases the sample rate of the input sequence by this factor.
Dependencies
This parameter appears only when you set the Coefficient source to Dialog parameters, Input port, or Auto.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Specify the FIR filter structure as either Direct
form or Direct form
transposed.
Dependencies
This parameter appears only when you set the Coefficient source to Dialog parameters, Input port, or Auto.
Specify the name of the multirate filter object that you want the block to
implement. You must specify the filter as a dsp.FIRDecimator
System object.
You can define the System object directly in the block dialog box. Alternatively, you can define the object in a MATLAB® workspace variable and specify the variable in the block dialog box.
For information on creating System objects, see Define Basic System Objects.
Dependencies
This parameter appears only when you set the Coefficient source to Filter object.
Specify how the block should process the input. You can set this parameter to one of the following options:
Columns as channels (frame based)— When you select this option, the block treats each column of the input as a separate channel.Elements as channels (sample based)— When you select this option, the block treats each element of the input as a separate channel.
Specify the method by which the block should decimate the input. You can select one of the following options:
Enforce single-rate processing— When you select this option, the block maintains the input sample rate and decimates the signal by decreasing the output frame size by a factor of M. To select this option, you must set the Input processing parameter toColumns as channels (frame based).When you set the Rate options parameter to
Enforce single-rate processing, you can use the FIR Decimation block inside triggered subsystems.Allow multirate processing— When you select this option, the block decimates the signal such that the output sample rate is M times slower than the input sample rate.
Specify whether fixed-size input signals (whose size does not change during simulation) can have an arbitrary frame length, where the frame length does not have to be a multiple of the decimation factor. The block uses this parameter setting only for fixed-size input signals and ignores this parameter if the input has a variable-size.
When the input signal is a variable-size signal, the signal can have arbitrary frame length, that is, the frame length does not have to be a multiple of the decimation factor.
For fixed-size input signals, if you:
Select the Allow arbitrary frame length for fixed-size input signals parameter, the frame length of the signal does not have to be a multiple of the decimation factor. If the input is not a multiple of the decimation factor, then the output is generally a variable-size signal. Therefore, to support arbitrary input size, the block must also support variable-size operations, which you can enable by selecting the Allow arbitrary frame length for fixed-size input signals parameter.
Clear the Allow arbitrary frame length for fixed-size input signals parameter, the input frame length must be a multiple of the decimation factor.
Dependency
To enable this parameter, set Input processing to
Columns as channels (frame based) and
Rate options to Enforce
single-rate processing.
When you set the FIR Decimation block to the frame-based processing mode, the block can exhibit one-frame latency. In the case of one-frame latency, this parameter specifies the output of the block until the first filtered input sample is available. Specify this parameter as a scalar value to be applied to all signal channels, or as a matrix containing one value for each channel.
Cases of one-frame latency can occur when the input frame size is greater than one, and you set the Input processing and Rate options parameters of the FIR Decimation block as follows:
Input processing set to
Columns as channels (frame based)Rate options set to
Allow multirate processing
For more information on latency in the FIR Decimation block, see Latency.
Dependencies
This parameter appears only when you configure the block to perform
multirate processing by setting Rate options to
Allow multirate processing.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Complex Number Support: Yes
Click on this button to open the Filter Visualization Tool (fvtool) and display the filter response of the filter
defined in the block dialog box.
Data Types Tab
Select the rounding
mode for fixed-point operations. The default is
Floor. The filter coefficients do not obey
this parameter and always round to
Nearest.
Note
The Rounding mode and Saturate on integer overflow settings have no effect on numerical results when all the following conditions exist:
Product output is
Inherit: Inherit via internal ruleAccumulator is
Inherit: Inherit via internal ruleOutput is
Inherit: Same as accumulator
With these data type settings, the block is effectively operating in the full-precision mode.
When you select this parameter, the block saturates the result of its
fixed-point operation. When you clear this parameter, the block wraps the
result of its fixed-point operation. For details on
saturate and wrap, see overflow
mode for fixed-point operations.
Note
The Rounding mode and Saturate on integer overflow parameters have no effect on numeric results when all these conditions are met:
Product output data type is
Inherit: Inherit via internal rule.Accumulator data type is
Inherit: Inherit via internal rule.
With these data type settings, the block operates in full-precision mode.
Specify the coefficients data type. See Fixed-Point Data Types and Multiplication Data Types for illustrations depicting the use of the coefficients data type in this block.
You can set this parameter to one of the following:
Inherit: Same word length as inputfixdt(1,16,0)orfixdt(1,16)— Specify a data type object.
Click the Show data type assistant button
![]() to display the Data Type
Assistant, which helps you set the
Coefficients parameter.
to display the Data Type
Assistant, which helps you set the
Coefficients parameter.
See Specify Data Types Using Data Type Assistant (Simulink) for more information.
Dependencies
This parameter appears only when you set Coefficient
source to Dialog parameters,
Filter object, or
Auto.
When Coefficient source is set to
Filter object,
Coefficients parameter is automatically set to
Same word length as input.
Specify the minimum value of the filter coefficients. The default value is
[] (unspecified). Simulink® software uses this value to perform automatic scaling of
fixed-point data types.
Dependencies
This parameter appears only when you set Coefficient
source to Dialog parameters or
Auto.
Specify the maximum value of the filter coefficients. The default value is
[] (unspecified). Simulink software uses this value to perform automatic scaling of
fixed-point data types.
Dependencies
This parameter appears only when you set Coefficient
source to Dialog parameters or
Auto.
Specify the product output data type. See Fixed-Point Data Types and Multiplication Data Types for illustrations depicting the use of the product output data type in this block.
You can set this parameter to one of the following:
Inherit: Inherit via internal ruleFor more information on this rule, see Inherit via Internal Rule.
Inherit: Same as inputfixdt(1,16,0)— Specify a data type object.
Click the Show data type assistant button
![]() to display the Data Type
Assistant, which helps you set the Product
output parameter.
to display the Data Type
Assistant, which helps you set the Product
output parameter.
See Specify Data Types Using Data Type Assistant (Simulink) for more information.
Dependencies
When Coefficient source is set to
Filter object, Product
output parameter is automatically set to Full
precision.
Specify the accumulator data type. See Fixed-Point Data Types for illustrations depicting the use of the accumulator data type in this block.
You can set this parameter to one of the following:
Inherit: Inherit via internal rule.For more information on this rule, see Inherit via Internal Rule.
Inherit: Same as inputInherit: Same as product outputfixdt(1,16,0)— Specify a data type object.
Click the Show data type assistant button
![]() to display the Data Type
Assistant, which helps you set the
Accumulator parameter.
to display the Data Type
Assistant, which helps you set the
Accumulator parameter.
See Specify Data Types Using Data Type Assistant (Simulink) for more information.
Dependencies
When Coefficient source is set to
Filter object,
Accumulator parameter is automatically set to
Full precision.
Specify the output data type. See Fixed-Point Data Types for illustrations depicting the use of the output data type in this block.
You can set it to one of the following:
Inherit: Same as accumulatorInherit: Same as inputInherit: Same as product outputfixdt(1,16,0)— Specify a data type object.
Click the Show data type assistant button
![]() to display the Data Type
Assistant, which helps you set the
Output parameter.
to display the Data Type
Assistant, which helps you set the
Output parameter.
See Control Data Types of Signals (Simulink) for more information.
Dependencies
When Coefficient source is set to
Filter object,
Output parameter is automatically set to
Same as accumulator.
Specify the minimum value that the block should output. The default value
is [] (unspecified). Simulink software uses this value to perform:
Simulation range checking (see Specify Signal Ranges (Simulink))
Automatic scaling of fixed-point data types
Dependencies
This parameter appears only when you set Coefficient
source to Dialog parameters,
Input port, or
Auto.
Specify the maximum value that the block should output. The default value
is [] (unspecified). Simulink software uses this value to perform:
Simulation range checking (see Specify Signal Ranges (Simulink))
Automatic scaling of fixed-point data types
Dependencies
This parameter appears only when you set Coefficient
source to Dialog parameters,
Input port, or
Auto.
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
More About
The following diagram shows the data types used within the FIR Decimation block for fixed-point signals.

This diagram shows that data is stored in the input buffer with the same data type and scaling as the input. The block stores filtered data and any initial conditions in the output buffer using the output data type and scaling that you set in the block dialog box.
When at least one of the inputs to the multiplier is real, the output of the multiplier is in the product output data type. When both inputs to the multiplier are complex, the result of the multiplication is in the accumulator data type. For details on the complex multiplication performed by this block, see Multiplication Data Types.
Note
When the block input is fixed point, all internal data types are signed fixed-point values.
Algorithms
The FIR decimation filter is implemented efficiently using a polyphase structure. For more details on polyphase filters, see Polyphase Subfilters.
To derive the polyphase structure, start with the transfer function of the FIR filter:
N+1 is the length of the FIR filter.
You can rearrange this equation as follows:
M is the number of polyphase components, and its value equals the decimation factor that you specify.
You can write this equation as:
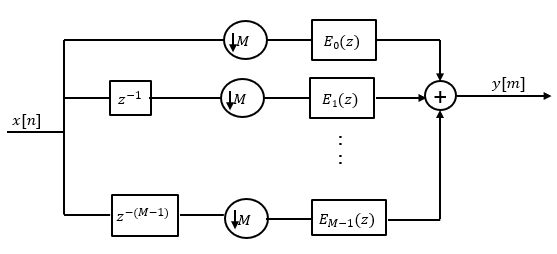
E0(zM), E1(zM), ..., EM-1(zM) are the polyphase components of the FIR filter H(z).
Conceptually, the FIR decimation filter contains a lowpass FIR filter followed by a downsampler.

Replace H(z) with its polyphase representation.

Here is the multirate noble identity for decimation.

Applying the noble identity for decimation moves the downsampling operation to before the filtering operation. This move enables you to filter the signal at a lower rate.
You can replace the delays and the decimation factor at the input with a commutator switch. The switch starts on the first branch 0 and moves in the counterclockwise direction as shown in this diagram. The accumulator at the output receives the processed input samples from each branch of the polyphase structure and accumulates these processed samples until the switch goes to branch 0. When the switch goes to branch 0, the accumulator outputs the accumulated value.
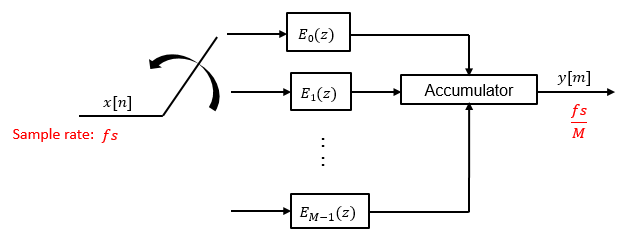
When the first input sample is delivered, the switch feeds this input to the branch 0 and the decimator computes the first output value. As more input samples come in, the switch moves in the counter clockwise direction through branches M−1, M−2, and all the way up to branch 0, delivering one sample at a time to each branch. When the switch comes to branch 0, the decimator outputs the next set of output values. This process continues as data keeps coming in. Every time the switch comes to the branch 0, the decimator outputs y[m]. The decimator effectively outputs one sample for every M samples it receives. Hence the sample rate at the output of the FIR decimation filter is fs/M.
References
[1] Fliege, N. J. Multirate Digital Signal Processing: Multirate Systems, Filter Banks, Wavelets. West Sussex, England: John Wiley & Sons, 1994.
[2] Orfanidis, Sophocles J. Introduction to Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1996.
Extended Capabilities
Version History
Introduced before R2006aSee Also
Functions
firgr|firceqrip|firnyquist
Objects
Blocks
- Variable FIR Decimation | FIR Interpolation | FIR Rate Conversion | FIR Halfband Interpolator | FIR Halfband Decimator | IIR Halfband Interpolator | IIR Halfband Decimator | CIC Compensation Interpolator | CIC Compensation Decimator | Downsample | CIC Decimation | Digital Up-Converter | Digital Down-Converter