Tracking degli oggetti e stima del movimento
La stima del movimento e il tracking sono attività fondamentali in molte applicazioni di visione artificiale, tra cui il riconoscimento delle attività, il monitoraggio del traffico, la sicurezza automotive e la sorveglianza.
Computer Vision Toolbox™ fornisce algoritmi di tracking video, quali lo spostamento medio adattivo continuo (CAMShift) e il Kanade-Lucas-Tomasi (KLT). È possibile utilizzare questi algoritmi per il tracking di un singolo oggetto oppure come blocchi costitutivi di un sistema di tracking più complesso. La toolbox fornisce inoltre un framework per il tracking di più oggetti, che include un filtro di Kalman e l'algoritmo ungherese per l'assegnazione dei rilevamenti degli oggetti alle tracce.
La stima del movimento è il processo che consente di determinare il movimento dei blocchi tra frame video adiacenti. Questa toolbox include algoritmi di stima del movimento, quali il flusso ottico, corrispondenza di blocchi e corrispondenza di modelli. Questi algoritmi generano vettori di movimento che possono riferirsi all'intera immagine, ai blocchi, a porzioni arbitrarie o ai singoli pixel. Per la corrispondenza di blocchi e modelli, le metriche di valutazione utilizzate per individuare la migliore corrispondenza includono l'errore quadratico medio (MSE), la deviazione assoluta media (MAD), la differenza assoluta massima (MaxAD), la somma delle differenze assolute (SAD) e la somma delle differenze al quadrato (SSD).
Funzioni
Argomenti
- Multiple Object Tracking
Locate a moving object or multiple objects over time in a video stream.
- What Is Optical Flow?
Track moving objects in videos using optical flow analysis.
Esempi in primo piano
Motion-Based Multiple Object Tracking
Perform automatic detection and motion-based tracking of moving objects in a video from a stationary camera.

Multi-Object Tracking with DeepSORT
Integrate appearance features from a re-Identification (Re-ID) deep neural network with a multi-object tracker.
Visual Tracking of Occluded and Unresolved Objects
Resolve challenging tracking scenarios when objects are occluded or when they are in close proximity to each other.

Implement Simple Online and Realtime Tracking
Implement the Simple Online and Realtime (SORT) object tracking algorithm using the Computer Vision Toolbox and the Sensor Fusion and Tracking Toolbox™.

Automate Labeling of Objects in Video Using RAFT Optical Flow
Use a pretrained RAFT optical flow estimation network to propagate a predefined object mask from one frame to the next in a video sequence.

Reidentify People Throughout a Video Sequence Using ReID Network
Track people throughout a video sequence using re-identification with a residual network.
Automate Ground Truth Labeling for Object Tracking and Re-Identification
Create an automation algorithm to automatically label data for object tracking and for object re-identification.

Convert Ground Truth Labeling Data for Object Re-Identification
Convert a groundTruth object to the re-identification training data format.
Convert Ground Truth Labeling Data for Object Tracking
Convert a groundTruth object to the trackCLEARmetrics truth format.
Tracking Pedestrians from a Moving Car
Track pedestrians using a camera mounted in a moving car.
Track a Face in Scene
Track a face using a minimum Eigen features detection function and a point tracker.
Face Detection and Tracking Using Live Video Acquisition
Automatically detect and track a face in a live video stream, using the KLT algorithm.
Face Detection and Tracking Using CAMShift
Automatically detect and track a face.
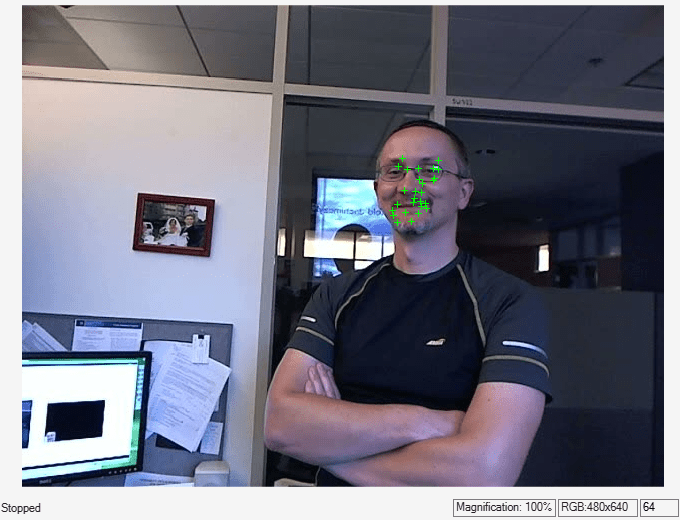
Face Detection and Tracking Using the KLT Algorithm
Automatically detect and track a face using feature points. The approach in this example keeps track of the face even when the person tilts his or her head, or moves toward or away from the camera.
Code Generation for Face Tracking with PackNGo
Generate code from Face Detection and Tracking Using the KLT Algorithm example with packNGo function. The packNGo (MATLAB Coder) function packages all relevant files in a compressed zip file so you can relocate, unpack, and rebuild your project in another development environment without MATLAB present. This example also shows how to create a makefile for the packNGo content, rebuild the source files and finally run the standalone executable outside MATLAB environment.
Use Kalman Filter for Object Tracking
Use the vision.KalmanFilter object and configureKalmanFilter function to track objects.

Import Camera-Based Datasets in MOT Challenge Format for Object Tracking
Read camera image sequences and convert the ground truth and detections to Sensor Fusion and Tracking Toolbox formats using a custom dataset.
Multi-Object Tracking and Human Pose Estimation
Detect multiple people, track them, and estimate their body poses in a video by using pretrained deep learning networks and a global nearest-neighbor (GNN) assignment tracking approach.

Stabilize Video Using Optical Flow
Use pretrained RAFT deep learning model to stabilize a video.
Risorse didattiche

Nozioni di base sulla visione artificiale
Imparare i fondamenti della segmentazione delle immagini nella visione artificiale.