nichols
Risposta di Nichols di un sistema dinamico
Descrizione
[ calcola la risposta in frequenza del modello di sistema dinamico mag,phase,wout] = nichols(sys)sys e restituisce la grandezza e la fase della risposta a ciascuna frequenza nel vettore wout. La funzione determina automaticamente le frequenze in wout in base alla dinamica del sistema.
nichols(___) traccia un grafico di Nichols della risposta in frequenza di sys. Il grafico mostra la grandezza (in dB) e la fase (in gradi) della risposta del sistema in funzione della frequenza. Per ulteriori opzioni di personalizzazione dei grafici, utilizzare nicholsplot.
Per tracciare le risposte di più sistemi dinamici sullo stesso grafico, è possibile specificare
syscome un elenco di modelli separati da virgole. Ad esempio,nichols(sys1,sys2,sys3)traccia le risposte di tre modelli sullo stesso grafico.Per specificare un colore, uno stile della linea e un marcatore per ogni sistema nel grafico, specificare un valore
LineSpecper ciascun sistema. Ad esempio,nichols(sys1,LineSpec1,sys2,LineSpec2)traccia due modelli e ne specifica lo stile di plottaggio. Per ulteriori informazioni sulla specifica di un valoreLineSpec, vederenicholsplot.
Esempi
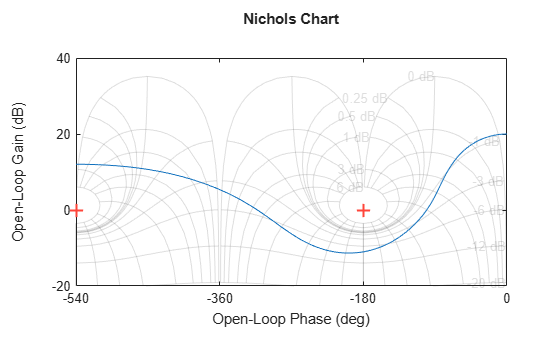
Tracciare la risposta di Nichols con le linee della griglia di Nichols per il seguente sistema:
H = tf([-4 48 -18 250 600],[1 30 282 525 60]); nichols(H) grid
Creare un grafico di Nichols su un intervallo di frequenza specificato. Utilizzare questo approccio quando si desidera concentrarsi sulla dinamica in un particolare intervallo di frequenze.
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
nichols(H,{1,100})L'array di celle {1,100} specifica i valori di frequenza minima e massima nel grafico di Nichols. Quando si forniscono i limiti di frequenza in questo modo, la funzione seleziona i punti intermedi per i dati di risposta in frequenza.
In alternativa, specificare un vettore di punti di frequenza da utilizzare per valutare e tracciare la risposta in frequenza.
w = 1:0.5:100;
nichols(H,w,'.-')

nichols traccia la risposta in frequenza solo alle frequenze specificate.
Paragonare la risposta in frequenza di un sistema a tempo continuo con un sistema discretizzato equivalente sullo stesso grafico di Nichols.
Creare sistemi dinamici a tempo continuo e a tempo discreto.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Hd = c2d(H,0.5,'zoh');Creare un grafico di Nichols che visualizzi entrambi i sistemi.
nichols(H,Hd)

Specificare lo stile della linea, il colore o il marcatore per ogni sistema in un grafico di Nichols utilizzando l'argomento di input LineSpec.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); Hd = c2d(H,0.5,'zoh'); nichols(H,'r',Hd,'b--')

Il primo LineSpec, 'r', specifica una linea rossa continua per la risposta di H. Il secondo LineSpec, 'b--', specifica una linea blu tratteggiata per la risposta di Hd.
Calcolare la grandezza e la fase della risposta in frequenza di un sistema SISO.
Se non si specificano le frequenze, nichols sceglie le frequenze in base alla dinamica del sistema e le restituisce nel terzo argomento di output.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); [mag,phase,wout] = nichols(H);
Poiché H è un modello SISO, le prime due dimensioni di mag e phase sono entrambe pari a 1. La terza dimensione è il numero di frequenze in wout.
size(mag)
ans = 1×3
1 1 110
length(wout)
ans = 110
Quindi, ogni voce lungo la terza dimensione di mag fornisce la grandezza della risposta alla frequenza corrispondente in wout.
Per questo esempio, creare un sistema a 2 output e 3 input.
rng(0,'twister');
H = rss(4,2,3);Per questo sistema, nichols traccia le risposte in frequenza di ciascun canale di I/O in un grafico separato in un'unica figura.
nichols(H)

Calcolare la grandezza e la fase di queste risposte a 20 frequenze comprese tra 1 e 10 radianti.
w = logspace(0,1,20); [mag,phase] = nichols(H,w);
mag e phase sono array tridimensionali, in cui le prime due dimensioni corrispondono alle dimensioni di output e input di H e la terza dimensione è il numero di frequenze. Ad esempio, esaminare le dimensioni di mag.
size(mag)
ans = 1×3
2 3 20
Quindi, in questo esempio, mag(1,3,10) è la grandezza della risposta dal terzo input al primo output, calcolata alla 10ª frequenza in w. In modo analogo, phase(1,3,10) contiene la fase della stessa risposta.
Creare un grafico di Nichols di un modello con coefficienti complessi e di un modello con coefficienti reali sullo stesso grafico.
rng(0) A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = rss(7); nichols(Gc,Gr) legend('Complex-coefficient model','Real-coefficient model','Location','southwest')

Per i modelli con coefficienti complessi, nichols mostra un contorno composto sia da frequenze positive che negative. Per i modelli con coefficienti reali, il grafico mostra solo le frequenze positive, anche in presenza di modelli con coefficienti complessi. È possibile fare clic sulla curva per analizzare più nel dettaglio quali sezioni e valori corrispondono alle frequenze positive e negative.
Argomenti di input
Argomenti di output
Suggerimenti
Quando sono necessarie ulteriori opzioni di personalizzazione del grafico, utilizzare invece
nicholsplot.I grafici creati utilizzando
nicholsnon supportano titoli o etichette su più righe specificati come array di stringhe o array di celle di vettori di caratteri. Per specificare titoli ed etichette su più righe, utilizzare una singola stringa con un caratterenewline.nichols(sys) title("first line" + newline + "second line");
Cronologia versioni
Introduzione prima di R2006aVedi anche
nyquist | bode | nicholsplot