tf
Modelli della funzione di trasferimento
Descrizione
Utilizzare tf per creare modelli di funzioni di trasferimento a valore reale o a valore complesso, o per convertire i modelli di sistemi dinamici in forma di funzioni di trasferimento.
Le funzioni di trasferimento sono una rappresentazione nel dominio della frequenza di sistemi lineari variabili nel tempo. Ad esempio, si consideri un sistema dinamico SISO a tempo continuo rappresentato dalla funzione di trasferimento sys(s) = N(s)/D(s), dove s = jw e N(s) e D(s) sono chiamati rispettivamente i polinomi del numeratore e del denominatore. L'oggetto del modello tf può rappresentare funzioni di trasferimento SISO o MIMO a tempo continuo o discreto.
È possibile creare un oggetto del modello di funzione di trasferimento specificandone direttamente i coefficienti o convertendo un modello di altro tipo (come un modello stato-spazio ss) in forma di funzione di trasferimento. Per ulteriori informazioni, vedere Funzioni di trasferimento.
È inoltre possibile utilizzare tf per creare modelli stato-spazio generalizzati (genss) o modelli stato-spazio incerti (uss (Robust Control Toolbox)).
Creazione
Sintassi
Descrizione
Creazione del modello di funzione di trasferimento
sys = tf(numerator,denominator)Numerator e Denominator. Ad esempio, si consideri un sistema dinamico SISO a tempo continuo rappresentato dalla funzione di trasferimento sys(s) = N(s)/D(s), i cui argomenti di input numerator e denominator sono rispettivamente i coefficienti di N(s) e D(s).
sys = tf(numerator,denominator,ts)Numerator, Denominator e Ts. Ad esempio, si consideri un sistema dinamico SISO a tempo discreto rappresentato dalla funzione di trasferimento sys(z) = N(z)/D(z), i cui argomenti di input numerator e denominator sono rispettivamente i coefficienti di N(z) e D(z). Per lasciare il tempo di campionamento non specificato, impostare l'argomento di input ts su -1.
sys = tf(numerator,denominator,ltiSys)ltiSys, compreso il tempo di campionamento.
sys = tf(___,PropertyName=Value)
Conversione in modello di funzione di trasferimento
sys = tf(ltiSys,Name=Value)ltiSys calcolando gli zeri e i poli in base a uno o più argomenti nome-valore specificati. Poiché questo metodo calcola gli zeri per ogni coppia input-output, è maggiormente adatto per i modelli con input-output di piccole dimensioni. (da R2025a)
Creazione della variabile per l'espressione razionale
s = tf('s') crea la variabile speciale s che può essere utilizzata in un'espressione razionale per creare un modello di funzione di trasferimento a tempo continuo. Utilizzare un'espressione razionale può talvolta risultare più semplice e intuitivo che specificare i coefficienti polinomiali.
Argomenti di input
Argomenti nome-valore
Argomenti di output
Proprietà
Funzioni oggetto
I seguenti elenchi contengono un sottoinsieme rappresentativo delle funzioni utilizzabili con i modelli tf. In linea generale, qualsiasi funzione applicabile a Modelli di sistemi dinamici è applicabile a un oggetto tf.
Esempi
Per questo esempio, si consideri il seguente modello di funzione di trasferimento SISO:
Specificare i coefficienti del numeratore e del denominatore in ordine di potenza decrescente di s e creare il modello dalla funzione di trasferimento.
numerator = 1; denominator = [2,3,4]; sys = tf(numerator,denominator)
sys =
1
---------------
2 s^2 + 3 s + 4
Continuous-time transfer function.
Model Properties
Per questo esempio, si consideri il seguente modello di funzione di trasferimento SISO a tempo discreto:
Specificare i coefficienti del numeratore e del denominatore in ordine di potenza decrescente di z e il tempo di campionamento di 0,1 secondi. Creare il modello di funzione di trasferimento a tempo discreto.
numerator = [2,0]; denominator = [4,0,3,-1]; ts = 0.1; sys = tf(numerator,denominator,ts)
sys =
2 z
---------------
4 z^3 + 3 z - 1
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Per questo esempio, si consideri un modello di funzione di trasferimento che rappresenta un sistema del secondo ordine con frequenza naturale e rapporto di smorzamento noti.
La funzione di trasferimento di un sistema del secondo ordine, espressa in termini del proprio rapporto di smorzamento e della propria frequenza naturale , è:
Creare la funzione di trasferimento del secondo ordine assumendo un rapporto di smorzamento = 0,25 e una frequenza naturale = 3 rad/s.
zeta = 0.25; w0 = 3; numerator = w0^2; denominator = [1,2*zeta*w0,w0^2]; sys = tf(numerator,denominator)
sys =
9
---------------
s^2 + 1.5 s + 9
Continuous-time transfer function.
Model Properties
Esaminare la risposta di questa funzione di trasferimento in un input a gradini.
stepplot(sys)

Il grafico mostra il tempo di smorzamento previsto per un sistema del secondo ordine con un basso rapporto di smorzamento.
Creare una funzione di trasferimento per il modello a multiplo input-multiplo output a tempo discreto:
con tempo di campionamento ts = 0.2 secondi.
Specificare i coefficienti del numeratore come una matrice 2x2.
numerators = {1 [1 0];[-1 2] 3};Specificare i coefficienti del denominatore comune come vettore riga.
denominator = [1 0.3];
Creare il modello di funzione di trasferimento MIMO a tempo discreto.
ts = 0.2; sys = tf(numerators,denominator,ts)
sys =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Per ulteriori informazioni sulla creazione di funzioni di trasferimento MIMO, vedere Funzioni di trasferimento MIMO.
In questo esempio, si crea un modello di funzione di trasferimento MIMO concatenando i modelli della funzione di trasferimento SISO. Si consideri la seguente funzione di trasferimento a input/output singolo:
Specificare il modello di funzione di trasferimento MIMO concatenando le voci SISO.
sys1 = tf([1 -1],[1 1]); sys2 = tf([1 2],[1 4 5]); sys = [sys1;sys2]
sys =
From input to output...
s - 1
1: -----
s + 1
s + 2
2: -------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
Per ulteriori informazioni sulla creazione di funzioni di trasferimento MIMO, vedere Funzioni di trasferimento MIMO.
Per questo esempio, creare un modello di funzione di trasferimento a tempo continuo utilizzando espressioni razionali. Utilizzare un'espressione razionale può talvolta risultare più semplice e intuitivo che specificare i coefficienti polinomiali del numeratore e del denominatore.
Si consideri il sistema seguente:
Per creare il modello di funzione di trasferimento, specificare innanzitutto s come oggetto tf.
s = tf('s')s = s Continuous-time transfer function. Model Properties
Creare il modello di funzione di trasferimento utilizzando s nell'espressione razionale.
sys = s/(s^2 + 2*s + 10)
sys =
s
--------------
s^2 + 2 s + 10
Continuous-time transfer function.
Model Properties
Per questo esempio, creare un modello di funzione di trasferimento a tempo discreto utilizzando un'espressione razionale. Utilizzare un'espressione razionale può talvolta risultare più semplice e intuitivo che specificare i coefficienti polinomiali.
Si consideri il sistema seguente:
Per creare il modello di funzione di trasferimento, specificare innanzitutto z come oggetto tf e il tempo di campionamento Ts.
ts = 0.1;
z = tf('z',ts)z = z Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
Creare il modello di funzione di trasferimento utilizzando z nell'espressione razionale.
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Per questo esempio, creare un modello di funzione di trasferimento con proprietà ereditate da un altro modello della funzione di trasferimento. Si consideri le due seguenti funzioni di trasferimento:
Per questo esempio, creare sys1 con le proprietà TimeUnit e InputDelay impostate su 'minutes'.
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Creare il secondo modello di funzione di trasferimento con le proprietà ereditate da sys1.
numerator2 = [1,-1]; denominator2 = [7,2,0,0,9]; sys2 = tf(numerator2,denominator2,sys1)
sys2 =
s - 1
-----------------
7 s^4 + 2 s^3 + 9
Continuous-time transfer function.
Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
Si noti che il modello di funzione di trasferimento sys2 ha le stesse proprietà di sys1.
È possibile utilizzare un loop for per specificare un array dei modelli della funzione di trasferimento.
Innanzitutto, preallocare l'array della funzione di trasferimento con degli zeri.
sys = tf(zeros(1,1,3));
I primi due indici rappresentano il numero di output e di input dei modelli, mentre il terzo indice è il numero di modelli presenti nell'array.
Creare il modello di funzione di trasferimento utilizzando un'espressione razionale nel loop for.
s = tf('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-----------
s^2 + s + 1
sys(:,:,2,1) =
2
-----------
s^2 + s + 2
sys(:,:,3,1) =
3
-----------
s^2 + s + 3
3x1 array of continuous-time transfer functions.
Model Properties
Per questo esempio, calcolare la funzione di trasferimento del seguente modello stato-spazio:
Creare il modello stato-spazio utilizzando le matrici stato-spazio.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Convertire il modello stato-spazio ltiSys n una funzione di trasferimento.
sys = tf(ltiSys)
sys =
From input 1 to output:
s
-------------
s^2 + 4 s + 5
From input 2 to output:
s^2 + 5 s + 8
-------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
Per questo esempio, estrarre i componenti misurati e di rumore di un modello polinomiale identificato in due funzioni di trasferimento separate.
Caricare il modello polinomiale Box-Jenkins ltiSys in identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys è un modello a tempo discreto identificato di forma: , dove rappresenta il componente misurato e rappresenta il componente di rumore.
Estrarre i componenti misurati e di rumore come funzioni di trasferimento.
sysMeas = tf(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.1426 z^-1 + 0.1958 z^-2
z^(-2) * ----------------------------
1 - 1.575 z^-1 + 0.6115 z^-2
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
sysNoise = tf(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.04556 + 0.03301 z^-1
----------------------------------------
1 - 1.026 z^-1 + 0.26 z^-2 - 0.1949 z^-3
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
Il componente misurato può servire come modello dell'impianto, mentre il componente di rumore può essere utilizzato come modello di disturbo per la progettazione del sistema di controllo.
Gli oggetti del modello di funzione di trasferimento includono i dati del modello che aiutano a tenere traccia di quanto rappresentato dal modello. Ad esempio, si possono assegnare i nomi agli input e agli output del modello.
Si consideri il seguente modello di funzione di trasferimento MIMO a tempo continuo:
Il modello ha un input corrente e due output coppia e velocità angolare.
Innanzitutto, specificare i coefficienti del numeratore e del denominatore del modello.
numerators = {[1 1] ; 1};
denominators = {[1 2 2] ; [1 0]};Creare il modello di funzione di trasferimento, specificando i nomi degli input e degli output.
sys = tf(numerators,denominators,'InputName','Current',... 'OutputName',{'Torque' 'Angular Velocity'})
sys =
From input "Current" to output...
s + 1
Torque: -------------
s^2 + 2 s + 2
1
Angular Velocity: -
s
Continuous-time transfer function.
Model Properties
Per questo esempio, specificare l'ordinamento dei polinomi nei modelli della funzione di trasferimento a tempo discreto utilizzando la proprietà 'Variable'.
Si considerino le seguenti funzioni di trasferimento a tempo discreto con tempo di campionamento di 0,1 secondi:
Creare la prima funzione di trasferimento a tempo discreto specificando i coefficienti z.
numerator = [1,0,0]; denominator = [1,2,3]; ts = 0.1; sys1 = tf(numerator,denominator,ts)
sys1 =
z^2
-------------
z^2 + 2 z + 3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
I coefficienti di sys1 sono in ordine di potenza decrescente di z.
tf commuta la convenzione in base al valore della proprietà 'Variable'. Poiché sys2 è il modello di funzione di trasferimento inversa di sys1, specificare 'Variable' come 'z^-1' e utilizzare gli stessi coefficienti del numeratore e del denominatore.
sys2 = tf(numerator,denominator,ts,'Variable','z^-1')
sys2 =
1
-------------------
1 + 2 z^-1 + 3 z^-2
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
I coefficienti di sys2 sono ora in ordine di potenza crescente di z^-1.
In base a diverse convenzioni, è possibile specificare l'ordinamento dei polinomi nei modelli della funzione di trasferimento a tempo discreto utilizzando la proprietà 'Variable'.
In questo esempio, si crea un filtro passa-basso con un parametro a sincronizzabile:
Poiché i coefficienti del numeratore e del denominatore di un blocco tunableTF sono indipendenti, non è possibile utilizzare tunableTF per rappresentare F. Costruire invece F utilizzando l'oggetto del parametro reale sincronizzabile realp.
Creare un parametro reale sincronizzabile con un valore iniziale di 10.
a = realp('a',10)a =
Name: 'a'
Value: 10
Minimum: -Inf
Maximum: Inf
Free: 1
Real scalar parameter.
Utilizzare tf per creare il filtro passa-basso sincronizzabile F.
numerator = a; denominator = [1,a]; F = tf(numerator,denominator)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: a: Scalar parameter, 2 occurrences. Model Properties Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
F è un oggetto genss che presenta il parametro sincronizzabile a nella proprietà Blocks. È possibile collegare F con altri modelli sincronizzabili o numerici per creare modelli di sistemi di controllo più complessi. Per un esempio, vedere Control System with Tunable Components.
In questo esempio, si crea un modello di funzione di trasferimento MIMO a guadagno statico.
Si consideri la seguente matrice di guadagno statico a due input e due output m:
Specificare la matrice di guadagno e creare il modello di funzione di trasferimento del guadagno statico.
m = [2,4;...
3,5];
sys1 = tf(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
È possibile utilizzare il modello di funzione di trasferimento del guadagno statico sys1 ottenuto in precedenza per collegarlo in cascata a un altro modello della funzione di trasferimento.
Per questo esempio, creare un altro modello di funzione di trasferimento a tempo discreto a due input e due output e utilizzare la funzione series per collegare i due modelli.
numerators = {1,[1,0];[-1,2],3};
denominator = [1,0.3];
ts = 0.2;
sys2 = tf(numerators,denominator,ts)sys2 =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
3 z^2 + 2.9 z + 0.6
1: -------------------
z^2 + 0.6 z + 0.09
-2 z^2 + 12.4 z + 3.9
2: ---------------------
z^2 + 0.6 z + 0.09
From input 2 to output...
5 z^2 + 5.5 z + 1.2
1: -------------------
z^2 + 0.6 z + 0.09
-4 z^2 + 21.8 z + 6.9
2: ---------------------
z^2 + 0.6 z + 0.09
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Da R2025a
Questo esempio mostra come ottenere un modello della funzione di trasferimento troncata di un modello stato-spazio rado. Questo esempio utilizza un modello rado ottenuto dalla linearizzazione di un modello termico di distribuzione del calore in un'asta cilindrica circolare.
Caricare i dati del modello.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
Analizzare la risposta in frequenza del modello.
sigmaplot(sys,w)
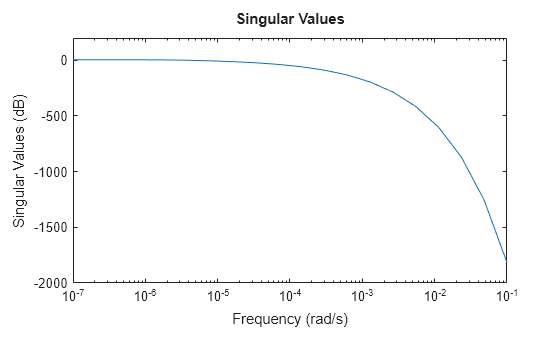
Per ottenere un'approssimazione troncata, utilizzare tf e specificare la banda di frequenza di interesse. Per questo modello, è possibile utilizzare un intervallo di frequenza da 0 rad/s a 0,01 rad/s per ottenere l'approssimazione di ordine basso.
tsys = tf(sys,Focus=[0 1e-2],Display="off");Confrontare la risposta in frequenza.
sigmaplot(sys,tsys,w)
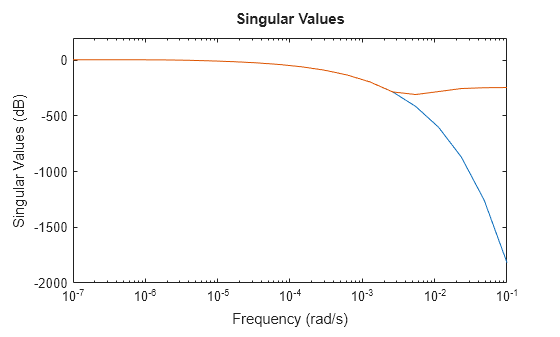
Questo modello termico presenta un decadimento molto rapido, oltre 0,001 rad/s. Per impostazione predefinita, il modello ridotto ottenuto utilizzando tf non fornisce una buona corrispondenza per questo decadimento. Per mitigare questo problema, è possibile utilizzare l'argomento RollOff di tf e specificare un valore minimo di decadimento oltre la banda di frequenza di interesse. Specificare un valore del gradiente di decadimento di -45, che corrisponde a una velocità di almeno –900 db/decade.
tsys2 = tf(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,tsys2,w)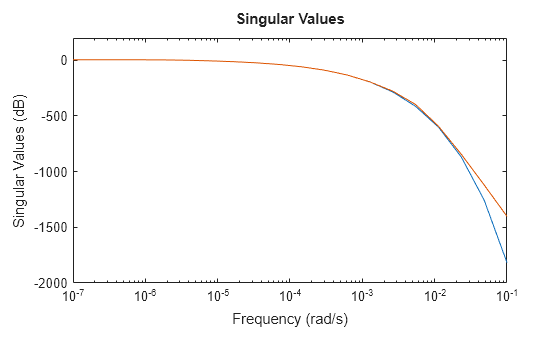
Il modello ridotto fornisce ora un'approssimazione molto più accurata del valore di decadimento. Tuttavia, in questo esempio, la nuova regolazione del gradiente di decadimento utilizzando tf richiede il ricalcolo degli zeri e dei poli. Questo può essere molto costoso dal punto di vista computazionale nel caso di modelli su larga scala. In alternativa, è possibile utilizzare il metodo di troncamento a polo zero di reducespec e regolare il decadimento senza costi computazionali aggiuntivi, dopo che il software ha calcolato i poli e gli zeri. Per un esempio, vedere Zero-Pole Truncation of Thermal Model.
Limiti
I modelli della funzione di trasferimento non sono adatti per i calcoli numerici. Una volta creati, devono essere convertiti nella forma stato-spazio prima di abbinarli ad altri modelli o di eseguire trasformazioni del modello. È quindi possibile riconvertire i modelli risultanti in forma di funzione di trasferimento a scopo di verifica
Un modello non lineare identificato non può essere convertito direttamente in un modello di funzione di trasferimento utilizzando
tf. Per ottenere un modello di funzione di trasferimento:Convertire il modello non lineare identificato in un modello LTI identificato utilizzando
linapp(System Identification Toolbox),idnlarx/linearize(System Identification Toolbox) oidnlhw/linearize(System Identification Toolbox).Quindi, convertire il modello risultante in un modello di funzione di trasferimento utilizzando
tf.
Algoritmi
Per convertire i modelli radi, tf utilizzare l'algoritmo di Krylov-Schur [1] per le iterazioni di potenza inversa per calcolare i poli e gli zeri nella banda di frequenza specificata.
Riferimenti
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.