zpk
Modello di guadagno a polo zero
Descrizione
Utilizzare zpk per creare modelli di guadagno a polo zero o per convertire modelli di sistemi dinamici nella forma a guadagno a polo zero.
I modelli di guadagno a polo zero sono una rappresentazione delle funzioni di trasferimento in forma fattorizzata. Si consideri, ad esempio, la seguente funzione di trasferimento SISO a tempo continuo:
G(s) può essere fattorizzata nella forma a guadagno a polo zero come segue:
Una rappresentazione più generale del modello SISO di guadagno a polo zero è la seguente:
In questo caso, z e p sono i vettori degli zeri e dei poli a valore reale o complesso, mentre k è il guadagno scalare a valore reale o complesso. Nei modelli MIMO, ogni canale I/O è rappresentato da una di queste funzioni di trasferimento hij(s).
È possibile creare un oggetto del modello di guadagno a polo zero specificando direttamente i poli, gli zeri e i guadagni oppure convertendo un modello di altro tipo (come un modello stato-spazio ss) nella forma a guadagno a polo zero.
È inoltre possibile utilizzare zpk per creare modelli stato-spazio generalizzati (genss) o modelli stato-spazio incerti (uss (Robust Control Toolbox)).
Creazione
Sintassi
Descrizione
Creazione del modello ZPK
sys = zpk(zeros,poles,gain)zeros e poles specificati come vettori e il valore scalare di gain. L'output sys è un oggetto del modello zpk che memorizza i dati del modello. Impostare zeros o poles su [] per i sistemi privi di zeri o poli. Questi due input non devono necessariamente avere la stessa lunghezza e il modello non deve necessariamente essere proprio (ossia presentare un numero eccessivo di poli).
sys = zpk(___,PropertyName=Value)
Conversione nel modello ZPK
sys = zpk(ltiSys,Name=Value)zpk del modello rado ltiSys calcolando gli zeri e i poli in base a uno o più argomenti nome-valore specificati. Poiché questo metodo calcola gli zeri per ogni coppia input-output, è maggiormente adatto per i modelli con input-output di piccole dimensioni. (da R2025a)
Creazione della variabile per l'espressione razionale
s = zpk('s') crea la variabile speciale s che può essere utilizzata in un'espressione razionale per creare un modello di guadagno a polo zero a tempo continuo. Utilizzare un'espressione razionale è talvolta più semplice e intuitivo che specificare i coefficienti polinomiali.
Argomenti di input
Argomenti nome-valore
Argomenti di output
Proprietà
Funzioni oggetto
I seguenti elenchi contengono un sottoinsieme rappresentativo delle funzioni utilizzabili con i modelli zpk. In linea generale, qualsiasi funzione applicabile a Modelli di sistemi dinamici è applicabile a un oggetto zpk.
Esempi
Per questo esempio, si consideri il seguente modello SISO di guadagno a polo zero a tempo continuo:
Specificare gli zeri, i poli e il guadagno, quindi creare il modello SISO di guadagno a polo zero.
zeros = 0; poles = [1-1i 1+1i 2]; gain = -2; sys = zpk(zeros,poles,gain)
sys =
-2 s
--------------------
(s-2) (s^2 - 2s + 2)
Continuous-time zero/pole/gain model.
Model Properties
Per questo esempio, si consideri il seguente modello SISO di guadagno a polo zero a tempo discreto e tempo di campionamento pari a 0,1 s:
Specificare gli zeri, i poli, i guadagni e il tempo di campionamento, quindi creare il modello SISO di guadagno a polo zero a tempo discreto.
zeros = [1 2 3]; poles = [6 5 4]; gain = 7; ts = 0.1; sys = zpk(zeros,poles,gain,ts)
sys = 7 (z-1) (z-2) (z-3) ------------------- (z-6) (z-5) (z-4) Sample time: 0.1 seconds Discrete-time zero/pole/gain model. Model Properties
In questo esempio, si crea un modello MIMO di guadagno a polo zero concatenando i modelli SISO di guadagno a polo zero. Si consideri il seguente modello di guadagno a polo zero a tempo continuo con input singolo e due output:
Specificare il modello MIMO di guadagno a polo zero concatenando le voci SISO.
zeros1 = 1; poles1 = -1; gain = 1; sys1 = zpk(zeros1,poles1,gain)
sys1 = (s-1) ----- (s+1) Continuous-time zero/pole/gain model. Model Properties
zeros2 = -2; poles2 = [-2+1i -2-1i]; sys2 = zpk(zeros2,poles2,gain)
sys2 =
(s+2)
--------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
sys = [sys1;sys2]
sys =
From input to output...
(s-1)
1: -----
(s+1)
(s+2)
2: --------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
Creare un modello di guadagno a polo zero a tempo discreto a multiplo-input multiplo-output:
con tempo di campionamento ts = 0.2 secondi.
Specificare gli zeri e i poli come array di celle e i guadagni come un array.
zeros = {[] 0;2 []};
poles = {-0.3 -0.3;-0.3 -0.3};
gain = [1 1;-1 3];
ts = 0.2;Creare il modello MIMO di guadagno a polo zero a tempo discreto.
sys = zpk(zeros,poles,gain,ts)
sys =
From input 1 to output...
1
1: -------
(z+0.3)
- (z-2)
2: -------
(z+0.3)
From input 2 to output...
z
1: -------
(z+0.3)
3
2: -------
(z+0.3)
Sample time: 0.2 seconds
Discrete-time zero/pole/gain model.
Model Properties
Specificare gli zeri, i poli e il guadagno insieme al tempo di campionamento e creare il modello di guadagno a polo zero, specificando i nomi di stato e di input utilizzando le coppie nome-valore.
zeros = 4; poles = [-1+2i -1-2i]; gain = 3; ts = 0.05; sys = zpk(zeros,poles,gain,ts,'InputName','Force')
sys =
From input "Force" to output:
3 (z-4)
--------------
(z^2 + 2z + 5)
Sample time: 0.05 seconds
Discrete-time zero/pole/gain model.
Model Properties
Il numero dei nomi di input deve essere coerente con il numero di zeri.
Assegnare un nome agli input e agli output può risultare utile quando si tratta di grafici di risposta per i sistemi MIMO.
step(sys)
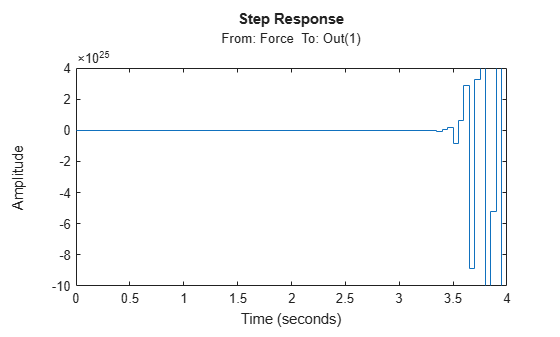
Si noti il nome dell'input Force nel titolo del grafico di risposta al gradino.
Per questo esempio, creare un modello di guadagno a polo zero a tempo continuo utilizzando espressioni razionali. Utilizzare un'espressione razionale può talvolta risultare più semplice e intuitivo che specificare i poli e gli zeri.
Si consideri il sistema seguente:
Per creare il modello di funzione di trasferimento, specificare innanzitutto s come oggetto zpk.
s = zpk('s')s = s Continuous-time zero/pole/gain model. Model Properties
Creare il modello di guadagno a polo zero utilizzando s nell'espressione razionale.
sys = s/(s^2 + 2*s + 10)
sys =
s
---------------
(s^2 + 2s + 10)
Continuous-time zero/pole/gain model.
Model Properties
Per questo esempio, creare un modello di guadagno a polo zero a tempo discreto utilizzando un'espressione razionale. Utilizzare un'espressione razionale può talvolta risultare più semplice e intuitivo che specificare i poli e gli zeri.
Si consideri il sistema seguente:
Per creare il modello di guadagno a polo zero, specificare innanzitutto z come zpk e il tempo di campionamento ts.
ts = 0.1;
z = zpk('z',ts)z = z Sample time: 0.1 seconds Discrete-time zero/pole/gain model. Model Properties
Creare il modello di guadagno a polo zero utilizzando z nell'espressione razionale.
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
(z-1)
-------------------
(z^2 - 1.85z + 0.9)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
Model Properties
Per questo esempio, creare un modello di guadagno a polo zero con proprietà ereditate da un altro modello di guadagno a polo zero. Si considerino i seguenti due modelli di guadagno a polo zero:
Per questo esempio, creare sys1 con le proprietà TimeUnit e InputDelay impostate su 'minutes'.
zero1 = 0; pole1 = [0;-8]; gain1 = 2; sys1 = zpk(zero1,pole1,gain1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
-------
s (s+8)
Continuous-time zero/pole/gain model.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Creare il secondo modello di guadagno a polo zero con le proprietà ereditate da sys1.
zero = 1; pole = [-3,5]; gain2 = 0.8; sys2 = zpk(zero,pole,gain2,sys1)
sys2 = 0.8 (s-1) ----------- (s+3) (s-5) Continuous-time zero/pole/gain model. Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
Si noti che il modello di guadagno a polo zero sys2 ha le stesse proprietà di sys1.
Si consideri la seguente matrice di guadagno statico a due input e due output m:
Specificare la matrice di guadagno e creare il modello di guadagno a polo zero a guadagno statico.
m = [2,4;...
3,5];
sys1 = zpk(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
È possibile utilizzare il modello di guadagno a polo zero a guadagno statico sys1 ottenuto in precedenza per collegarlo in cascata a un altro modello di guadagno a polo zero.
sys2 = zpk(0,[-1 7],1)
sys2 =
s
-----------
(s+1) (s-7)
Continuous-time zero/pole/gain model.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
2 s
1: -----------
(s+1) (s-7)
3 s
2: -----------
(s+1) (s-7)
From input 2 to output...
4 s
1: -----------
(s+1) (s-7)
5 s
2: -----------
(s+1) (s-7)
Continuous-time zero/pole/gain model.
Model Properties
Per questo esempio, calcolare il modello di guadagno a polo zero del seguente modello stato-spazio:
Creare il modello stato-spazio utilizzando le matrici stato-spazio.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Convertire il modello stato-spazio ltiSys in un modello di guadagno a polo zero.
sys = zpk(ltiSys)
sys =
From input 1 to output:
s
--------------
(s^2 + 4s + 5)
From input 2 to output:
(s^2 + 5s + 8)
--------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
È possibile utilizzare un loop for per specificare un array di modelli di guadagno a polo zero.
Innanzitutto, preallocare l'array di modelli di guadagno a polo zero con degli zeri.
sys = zpk(zeros(1,1,3));
I primi due indici rappresentano il numero di output e di input dei modelli, mentre il terzo indice è il numero di modelli presenti nell'array.
Creare il modello di guadagno a polo zero utilizzando un'espressione razionale nel loop for.
s = zpk('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-------------
(s^2 + s + 1)
sys(:,:,2,1) =
2
-------------
(s^2 + s + 2)
sys(:,:,3,1) =
3
-------------
(s^2 + s + 3)
3x1 array of continuous-time zero/pole/gain models.
Model Properties
Per questo esempio, estrarre i componenti misurati e di rumore di un modello polinomiale identificato in due modelli di guadagno a polo zero separati.
Caricare il modello polinomiale Box-Jenkins ltiSys in identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys è un modello a tempo discreto identificato di forma: , dove rappresenta il componente misurato e rappresenta il componente di rumore.
Estrarre i componenti misurati e di rumore come modelli di guadagno a polo zero.
sysMeas = zpk(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.14256 z^-1 (1-1.374z^-1)
z^(-2) * -----------------------------
(1-0.8789z^-1) (1-0.6958z^-1)
Sample time: 0.04 seconds
Discrete-time zero/pole/gain model.
Model Properties
sysNoise = zpk(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.045563 (1+0.7245z^-1)
--------------------------------------------
(1-0.9658z^-1) (1 - 0.0602z^-1 + 0.2018z^-2)
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time zero/pole/gain model.
Model Properties
Il componente misurato può servire come modello dell'impianto, mentre il componente di rumore può essere utilizzato come modello di disturbo per la progettazione del sistema di controllo.
Per questo esempio, creare un modello SISO di guadagno a polo zero con un ritardo di input di 0,5 secondi e un ritardo di output di 2,5 secondi.
zeros = 5; poles = [7+1i 7-1i -3]; gains = 1; sys = zpk(zeros,poles,gains,'InputDelay',0.5,'OutputDelay',2.5)
sys =
(s-5)
exp(-3*s) * ----------------------
(s+3) (s^2 - 14s + 50)
Continuous-time zero/pole/gain model.
Model Properties
È inoltre possibile utilizzare il comando get per visualizzare tutte le proprietà di un oggetto MATLAB.
get(sys)
Z: {[5]}
P: {[3×1 double]}
K: 1
DisplayFormat: 'roots'
Variable: 's'
IODelay: 0
InputDelay: 0.5000
OutputDelay: 2.5000
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: ''
Ts: 0
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
Per ulteriori informazioni sulla specifica del ritardo temporale per un modello LTI, vedere Specifying Time Delays.
Per questo esempio, progettare un controller PID 2-DOF con una larghezza di banda target di 0,75 rad/s per un sistema rappresentato dal seguente modello di guadagno a polo zero:
Creare un oggetto del modello di guadagno a polo zero sys utilizzando il comando zpk.
zeros = []; poles = [-0.25+0.2i;-0.25-0.2i]; gain = 1; sys = zpk(zeros,poles,gain)
sys =
1
---------------------
(s^2 + 0.5s + 0.1025)
Continuous-time zero/pole/gain model.
Model Properties
Utilizzando la larghezza di banda target, utilizzare pidtune per generare un controller 2-DOF.
wc = 0.75;
C2 = pidtune(sys,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 0.512, Ki = 0.0975, Kd = 0.574, b = 0.38, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
L'utilizzo del tipo 'PID2', determina la generazione di un controller 2-DOF da parte di pidtune, rappresentato come un oggetto pid2. La visualizzazione conferma questo risultato. La visualizzazione mostra inoltre che pidtune sincronizza tutti i coefficienti del controller, inclusi i pesi dei setpoint b e c per bilanciare prestazioni e robustezza.
Per sincronizzare il PID in modo interattivo nel Live Editor, vedere l'attività Tune PID Controller Live Editor. Questa attività consente di progettare un controller PID in modo interattivo e genera automaticamente il codice MATLAB per lo script live.
Per sincronizzare il PID in modo interattivo in un'applicazione autonoma, utilizzare PID Tuner. Per un esempio di progettazione di un controller utilizzando l'app, vedere Progettazione di un controller PID per un tracking di riferimento veloce.
Da R2025a
Questo esempio mostra come ottenere un modello troncato a guadagno a polo zero di un modello stato-spazio rado. Questo esempio utilizza un modello rado ottenuto dalla linearizzazione di un modello termico di distribuzione del calore in un'asta cilindrica circolare.
Caricare i dati del modello.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
Analizzare la risposta in frequenza del modello.
sigmaplot(sys,w)
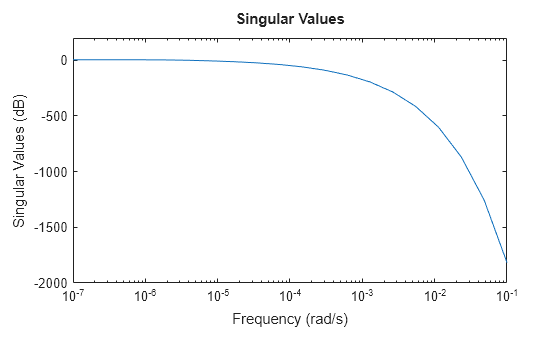
Per ottenere un'approssimazione troncata, utilizzare zpk e specificare la banda di frequenza di interesse. Per questo modello, è possibile utilizzare un intervallo di frequenza da 0 rad/s a 0,01 rad/s per ottenere l'approssimazione di ordine basso.
zsys = zpk(sys,Focus=[0 1e-2],Display="off");Confrontare la risposta in frequenza.
sigmaplot(sys,zsys,w)
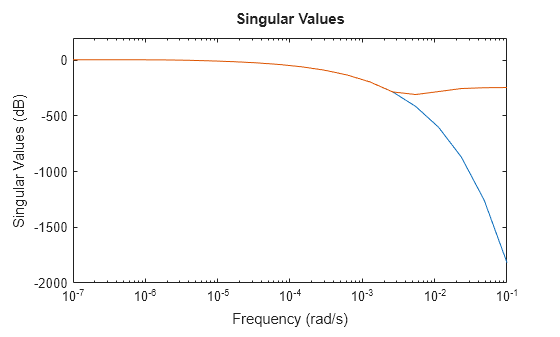
Questo modello termico presenta un decadimento molto rapido, oltre 0,001 rad/s. Per impostazione predefinita, il modello ridotto ottenuto utilizzando zpk non fornisce una buona corrispondenza per questo decadimento. Per mitigare questo problema, è possibile utilizzare l'argomento RollOff di zpk e specificare un valore minimo di decadimento oltre la banda di frequenza di interesse. Specificare un valore del gradiente di decadimento di -45, che corrisponde a una velocità di almeno –900 db/decade.
zsys2 = zpk(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,zsys2,w)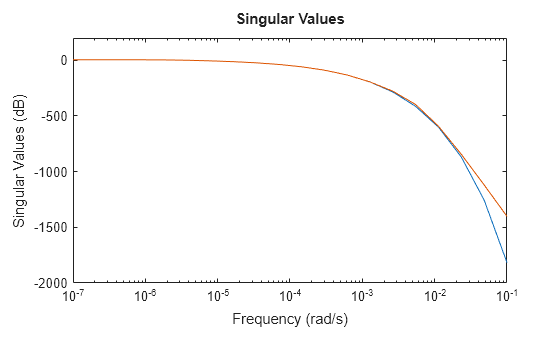
Il modello ridotto fornisce ora un'approssimazione molto più accurata del valore di decadimento. Tuttavia, in questo esempio, la nuova regolazione del gradiente di decadimento utilizzando zpk richiede il ricalcolo degli zeri e dei poli. Questo può essere molto costoso dal punto di vista computazionale nel caso di modelli su larga scala. In alternativa, è possibile utilizzare il metodo di troncamento a polo zero di reducespec e regolare il decadimento senza costi computazionali aggiuntivi, dopo che il software ha calcolato i poli e gli zeri. Per un esempio, vedere Zero-Pole Truncation of Thermal Model.
Algoritmi
zpk utilizza la funzione di MATLAB roots per convertire le funzioni di trasferimento e le funzioni zero e pole per convertire i modelli stato-spazio.
Per convertire i modelli radi, zpk utilizzare l'algoritmo di Krylov-Schur [1] per le iterazioni di potenza inversa per calcolare i poli e gli zeri nella banda di frequenza specificata.
Riferimenti
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.