Calibrazione delle fotocamere
La calibrazione della fotocamera è il processo di stima dei parametri della fotocamera utilizzando immagini che contengono un pattern di calibrazione. I parametri includono i parametri intrinseci della fotocamera, i coefficienti di distorsione e i parametri estrinseci della fotocamera. Utilizzare questi parametri della fotocamera per eliminare gli effetti di distorsione dell'obiettivo da un'immagine, misurare oggetti piani, ricostruire scene tridimensionali da più fotocamere ed eseguire altre applicazioni di visione artificiale.
Fare clic su un'illustrazione per visualizzare l'argomento relativo.
La calibrazione delle fotocamere fisheye amplia questo processo stimando i parametri e i coefficienti di distorsione specifici degli obiettivi fisheye, fondamentale per correggere la distorsione estrema e mappare con precisione i punti dell'immagine sulle coordinate del mondo reale in applicazioni quali SLAM, odometria, sorveglianza, realtà virtuale e unione di immagini. La calibrazione multi-camera assicura una rappresentazione coerente della geometria della scena tra tutte le telecamere, abilitando applicazioni come motion capture 3D, ricostruzione e fotogrammetria, mentre la calibrazione mano-occhio robotica stima la relazione spaziale tra il braccio robotico e la camera per consentire controllo visivo e interazione di precisione. È possibile utilizzare l'app e le funzioni Camera Calibrator per i parametri intrinseci, estrinseci e di distorsione delle fotocamere singole, l'app e le funzioni Stereo Camera Calibrator per i parametri stereo e i relativi orientamenti, nonché le funzioni dedicate alla calibrazione fisheye per l'eliminazione della distorsione e una ricostruzione tridimensionale grandangolare accurata.
App
| Camera Calibrator | Estimate geometric parameters of a single camera |
| Stereo Camera Calibrator | Estimate geometric parameters of a stereo camera |
Funzioni
Argomenti
- What Is Camera Calibration?
Estimate the parameters of a lens and image sensor of an image or video camera.
- What Is Robot Hand-Eye Calibration?
Understand moving- and stationary- robot camera configurations for hand-eye calibration.
- What Is Multi-Camera Calibration?
Estimate position and orientations of cameras in a multi-camera system.
- Fisheye Calibration Basics
Fisheye camera model and calibration in MATLAB.
- Using the Single Camera Calibrator App
Prepare camera calibration images and estimate camera intrinsic parameters.
- Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
- Calibration Patterns
Camera Calibration using a checkerboard, circle grid, or custom detector pattern.
- Prepare Camera and Capture Images for Camera Calibration
Set up your camera and capture camera calibration images to use with the calibrator app.
- Prepare Cameras and Capture Images for Multi-Camera Calibration
Set up your camera and capture camera calibration images for multi-camera calibration.
- Point Feature Types
Choose functions that return and accept points objects for several types of features.
- Sistemi di coordinate
Specificare gli indici dei pixel, le coordinate spaziali e i sistemi di coordinate in 3D
Esempi in primo piano
3-D Motion Reconstruction Using Multiple Cameras
Reconstruct 3-D motion of an object for use in a motion capture system consisting of multiple cameras.
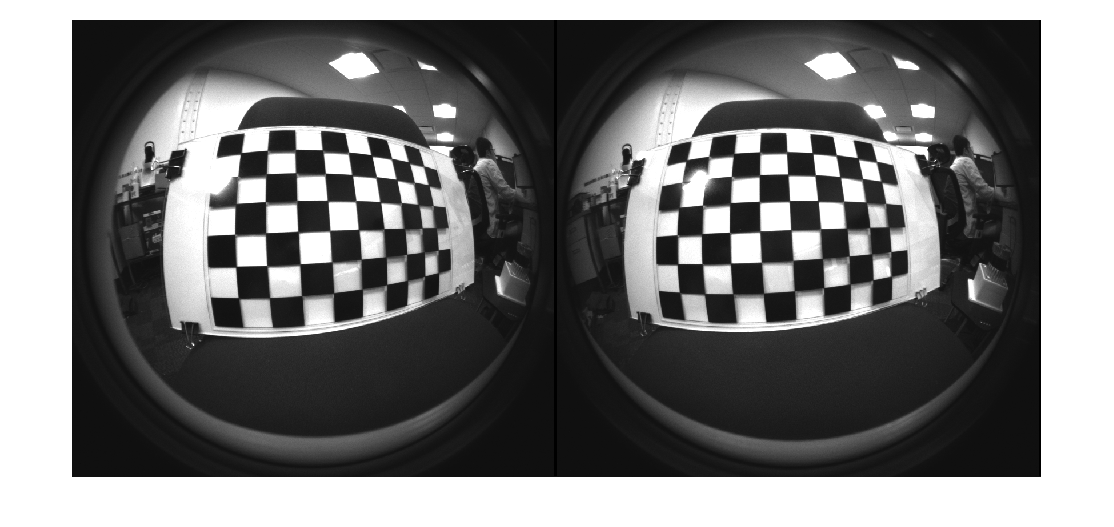
Stereo Fisheye Camera Calibration
Calibrate a stereo fisheye camera by determining each camera's intrinsic parameters and estimate the baseline between them.

Estimate Pose of Moving Camera Mounted on a Robot
Perform and verify hand-eye calibration for a robot arm equipped with a camera.

Estimate Pose of Fixed Camera Relative to Robot Base
Estimate the camera intrinsics for a fixed camera using hand-to-eye calibration.

Camera Calibration Using Custom Planar Calibration Patterns
Detect and localize AprilTags in a calibration pattern.

Evaluating the Accuracy of Single Camera Calibration
Evaluate the accuracy of estimated camera parameters.

Measuring Planar Objects with a Calibrated Camera
Measure the diameter of coins in world units using a single calibrated camera.
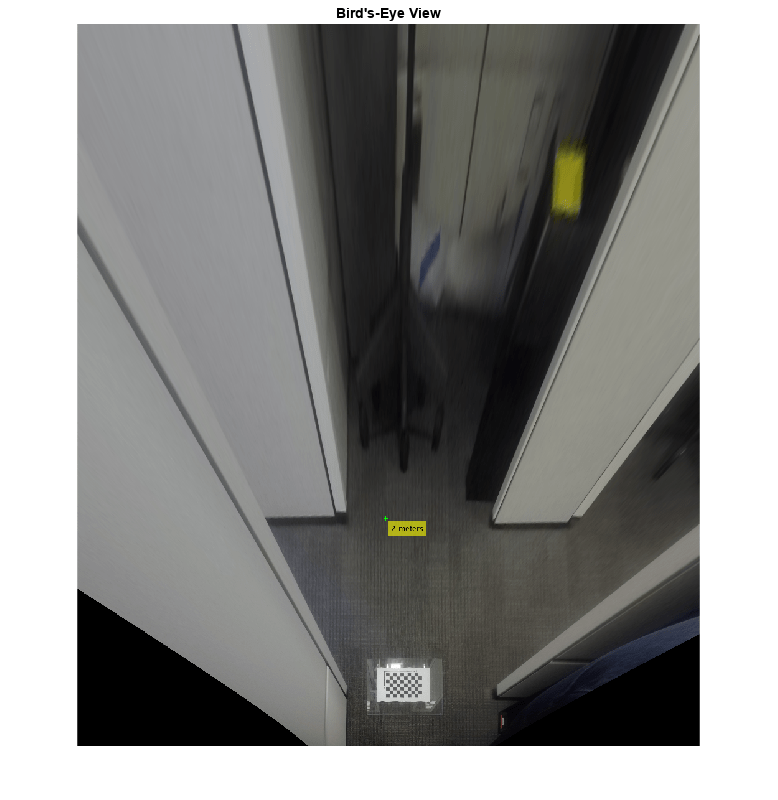
Configure Monocular Fisheye Camera
Convert a fisheye camera model to a pinhole model.